xiaoqiang tutorial (17) using ORB_SLAM2 to create a three-dimensional model of the environment
Using ORB_SLAM2 to create a three-dimensional model of the environment
To achieve visual navigation, a three-dimensional model of space is required. ORB_SLAM2 is a very effective algorithm for building spatial models. This algorithm is based on the recognition of ORB feature points, with high accuracy and high operating efficiency. We have modified the original algorithm, added the map's save and load functions, making it more applicable to the actual application scenario. The following describes the specific use.
Note: Since the ORB_SLAM2 version of xiaoqiang has been upgraded to the Galileo version, the runtime detects if a valid certificate is available. Xiaoqiang is configured with a valid certificate. If you do not have a certificate by default, and you can contact customer service to get a cert for free. If you are not a xiaoqiang user, then the following tutorial cannot be performed.
Prepared work
Before starting ORB_SLAM2, please confirm that Xiaoqiang's camera is working properly. When building map with ORB_SLAM2, xiaoqiang has to move around, it is inconvenient to display the ORB_SLAM2 status at the same time (ssh remote operation is not smooth, and it is impossible to drag the monitor while running), please install Xiaoqiang map remote control windows client to get a better experience.
Start ORB_SLAM2
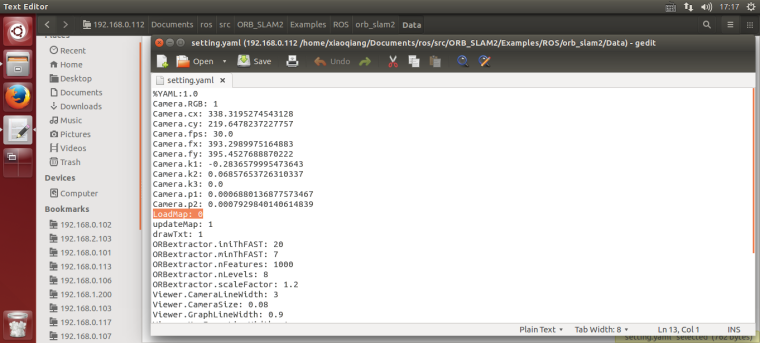
Change the configuration file. The configuration file for ORB_SLAM2 is located in the /home/xiaoqiang/Documents/ros/workspace/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/Data folder. Change the value of LoadMap in the setting4.yaml and set it to 0. When set to 1, the program automatically loads map data from the /home/xiaoqiang/slamdb folder after startup. When set to 0, map data will not be loaded. Since we want to create a map, LoadMap needs to be set to 0.
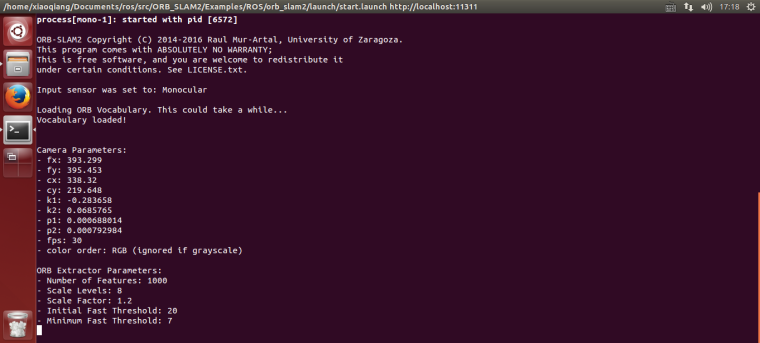
Use ssh to enter Xiaoqiang and execute the following command
ssh -X xiaoqiang@192.168.xxx.xxx
roslaunch ORB_SLAM2 map.launch
Began to create an environmental 3D model
Start Xiaoqiang remote control windows client, click on the "Not connected" button to connect Xiaoqiang. Right-click in the image window to open the "original image" and "ORB_SLAM2's feature point image"
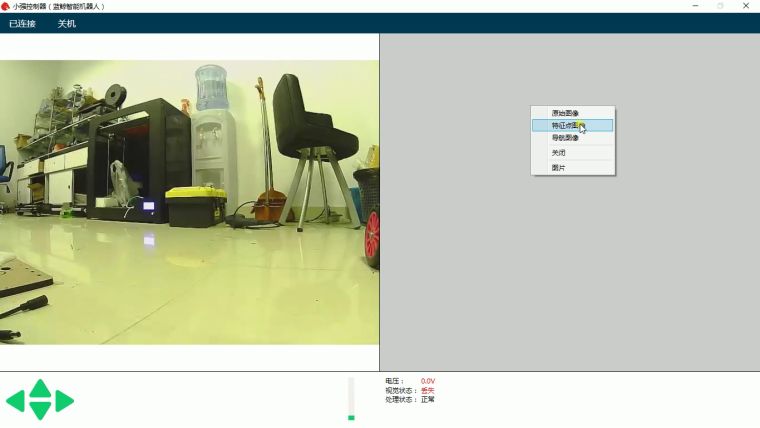

In the figure above, the left image is the camera's original color image, and the right side is the ORB_SLAM2 processed black and white image. ORB_SLAM2 has not been initialized successfully in the image, so the black and white image has no feature points. Hold down the "w" key to start the remote control Xiaoqiang, slowly move forward, so that ORB_SLAM2 initialized successfully, that is, black and white images began to appear red and green features.
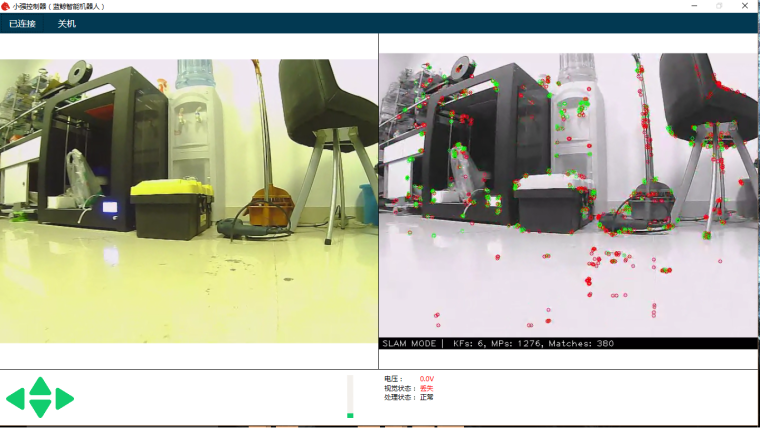
It is now possible to remote control of Xiaoqiang, and create a map of the surrounding environment. During the remote control process, it is necessary to ensure that the black-and-white image always has red and green feature points. If it does not exist, it means that the visual had lost, and it is necessary to remotely control Xiaoqiang to return to the place where the last missed lost position.
Use rviz to view the map result
Add Xiaoqiang IP address in the local virtual machine's hosts file, then open a new terminal to open rviz.
export ROS_MASTER_URI=http://xiaoqiang-desktop:11311
rviz
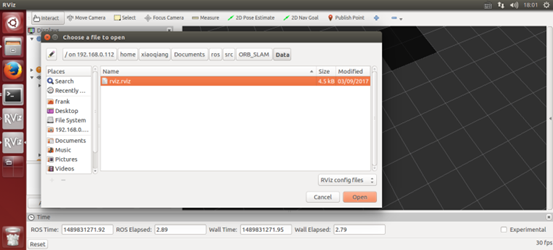
Open the /home/xiaoqiang/Documents/ros/src/ORB_SLAM/Data/rivz.rvizconfiguration file. Some systems may not be able to open this file remotely. You can copy the file locally and open it locally.
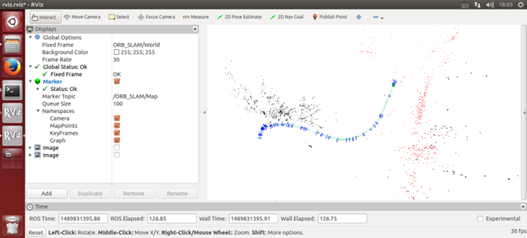
As shown in the figure below, the red and black points are three-dimensional models (sparse feature point clouds) created, and the blue boxes are keyframes that can represent the tracks of Xiaoqiang.
Save the map
After the map has been created to meet the requirements, start a new terminal in the VM and enter the following command to save the map:
ssh -X xiaoqiang@192.168.xxx.xxx
rostopic pub /map_save std_msgs/Bool '{data: true}' -1
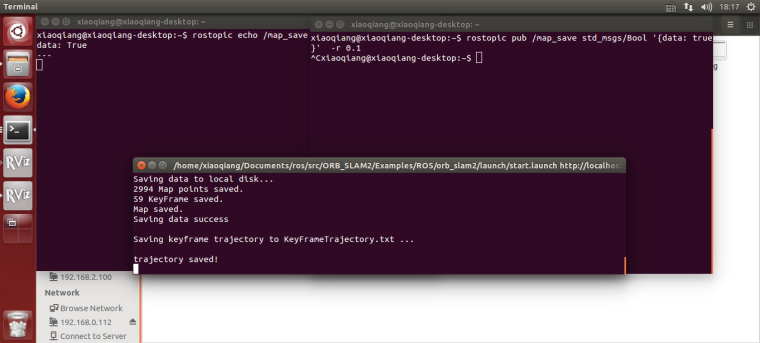
The map file will be created in ~/home/slamdb.
Loading of maps
You can load the map into ORB_SLAM2 again after saving the map. After the map is loaded, the program can quickly locate the location of the camera. The way to load the map is also very simple.
roslaunch ORB_SLAM2 run.launch
The Loadmap was set to 1 by the launch file actually .
Post processing of maps
After creating the map, you may want to use this map for navigation, you need to do further operations on the map file. For example, to create a navigation path, and so on. This section can be found in the article Visual Navigation Path Editor Tutorial.
For xiaoqiang users, you can use Galileo navigation client, for more detail, please refer to Galileo navigation user manual
ORB_SLAM2 parameter explanation
The following is an ORB_SLAM2 setting file. The specific meaning of the parameter can refer to the comment.
%YAML:1.0
Camera.RGB: 1
# Camera calibration parameters,the parameters has moved to usb_cam after 2018.6
Camera.cx: 325.0466266836216
Camera.cy: 238.9974356449355
Camera.fps: 30.0
Camera.fx: 395.6779619478691
Camera.fy: 397.4934332366201
Camera.k1: -0.2805598785308578
Camera.k2: 0.06685114307459132
Camera.k3: 0.0
Camera.p1: -0.0009688764167839786
Camera.p2: -0.0002636873513136712
LoadMap: 0 # whether to load map, 1 load and 0 not load
updateMap: 1 # whether to update map while running,1 update and 0 not update.
drawTxt: 1 # whether to display text in processed video
# ORB_SLAM2 slam algorithm-related parameters
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
ORBextractor.nFeatures: 2000
ORBextractor.nLevels: 8
ORBextractor.scaleFactor: 1.2
# ORB_SLAM2 display-related parameters
Viewer.CameraLineWidth: 3
Viewer.CameraSize: 0.08
Viewer.GraphLineWidth: 0.9
Viewer.KeyFrameLineWidth: 1
Viewer.KeyFrameSize: 0.05
Viewer.PointSize: 1000
Viewer.ViewpointF: 500
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
UseImu: 1 # whether to use IMU, 1 use and 0 not use.
updateScale: 1 # Whether update scale while running, if set 1, the visual scale will be updated according to the data from odom
DealyCount: 5
# tf between camera and base_link
TbaMatrix: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [ 0., 0.03818382, 0.99927073, 0.06, -1., 0., 0., 0., 0., -0.99927073, 0.03818382, 0.0, 0., 0., 0., 1.]
# data: [ 0., 0.55176688, 0.83399839, 0., -1., 0., 0., 0., 0., -0.83399839, 0.55176688, 0., 0., 0., 0., 1.]
EnableGBA: 1 # whether to enable Global Bundle Adjustment
dropRate: 2 # frame skip rate, skip frames to improve performance
minInsertDistance: 0.3 # min distance between frames, prevent keyframes from being too dense. Insert only one frame at this distance.
EnableGC: 0 # Whether to enable memory recycling, 0 is disable, 1 is enable. Enable memory recycling can make more efficient use of memory, and the relative computational efficiency will decrease
FAQ
Q: Can I create map without the client?
A: Yes, you can. The client is mainly for remote control and video streaming. You can use command line remote control instead. But the client is recommended for better experience.
Q: Can I choose not to use IMU
A: The ORB_SLAM2 is an edited version with additional IMU support. If you don't want to use it, you can set UseImu to 0 in setting.yaml.
Q: Where is xiaoqiang's camera calibration file?
A:the camera calibration file located at usb_cam/launch/ov2610.yaml
Q: The camera's image is not clear
A:It may be that the camera's lens has been touched, causing it no focus. You can turn the camera lens and adjust the image to a clear position. Note that the camera parameters need to be re-calibrated after adjustment. Calibration methods can be found in how to calibrate camera