xiaoqiang tutorial (11) kinect follow package turtlebot_follower
kinect follow package turtlebot_follower
turtlebot_follower uses the point cloud image feed back by the depth camera to calculate the coordinates of the point cloud in a certain area as the target following point, and controls the platform movement to achieve the following function according to this coordinate and the set safety distance.
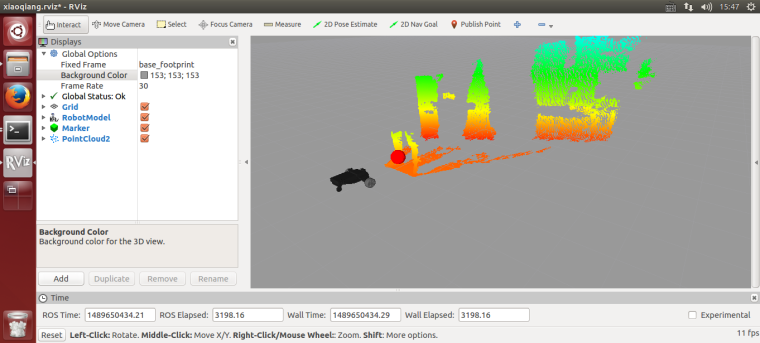
After Xiaoqiang identifies the human legs, a red ball is set as the target point in the human leg position, demo video 1
1.Install the package
After ssh logs in to the host, enter the ros workspace, download and install the test package
ssh xiaoqiang@192.168.xxx.xxx
cd Documents/ros/src/
git clone https://github.com/turtlebot/turtlebot_msgs.git
git clone https://github.com/BlueWhaleRobot/turtlebot_apps.git
cd ..
catkin_make
2.Ensure that Xiaoqiang is 2 meters * 2 meters in front of the open space without debris, first check the kinect angle is horizontal, if not in the horizontal state, please turn off the platform power, start the turtlebot_follower package on the Xiaoqiang host
ssh xiaoqiang@192.168.xxx.xxx
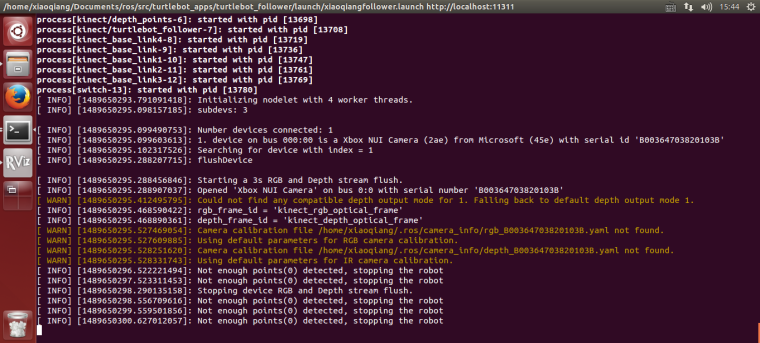
roslaunch turtlebot_follower xiaoqiangfollower.launch
The following figure will appear after normal startup
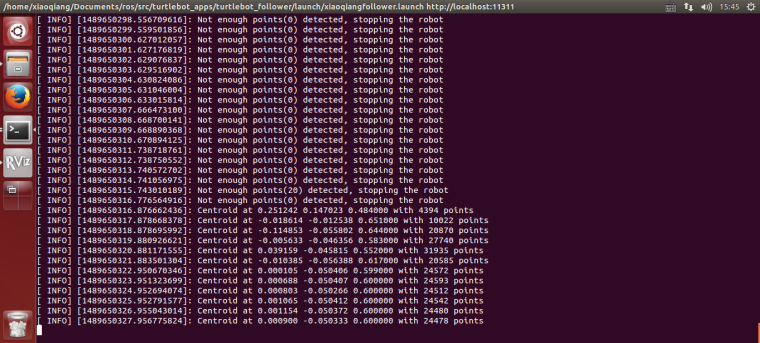
- At this point, someone enters Xiaoqiang’s front view and activates Xiaoqiang’s follow function. Xiaoqiang starts to move with the person’s movement.
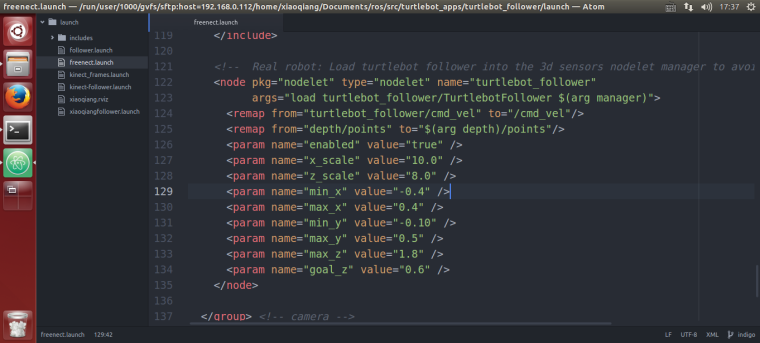
Modify the parameters in the /home/xiaoqiang/Documents/ros/src/turtlebot_apps/turtlebot_follower/launch/freenect.launch file on the Xiaoqiang host, similar to the following figure. Then you can control the following performance