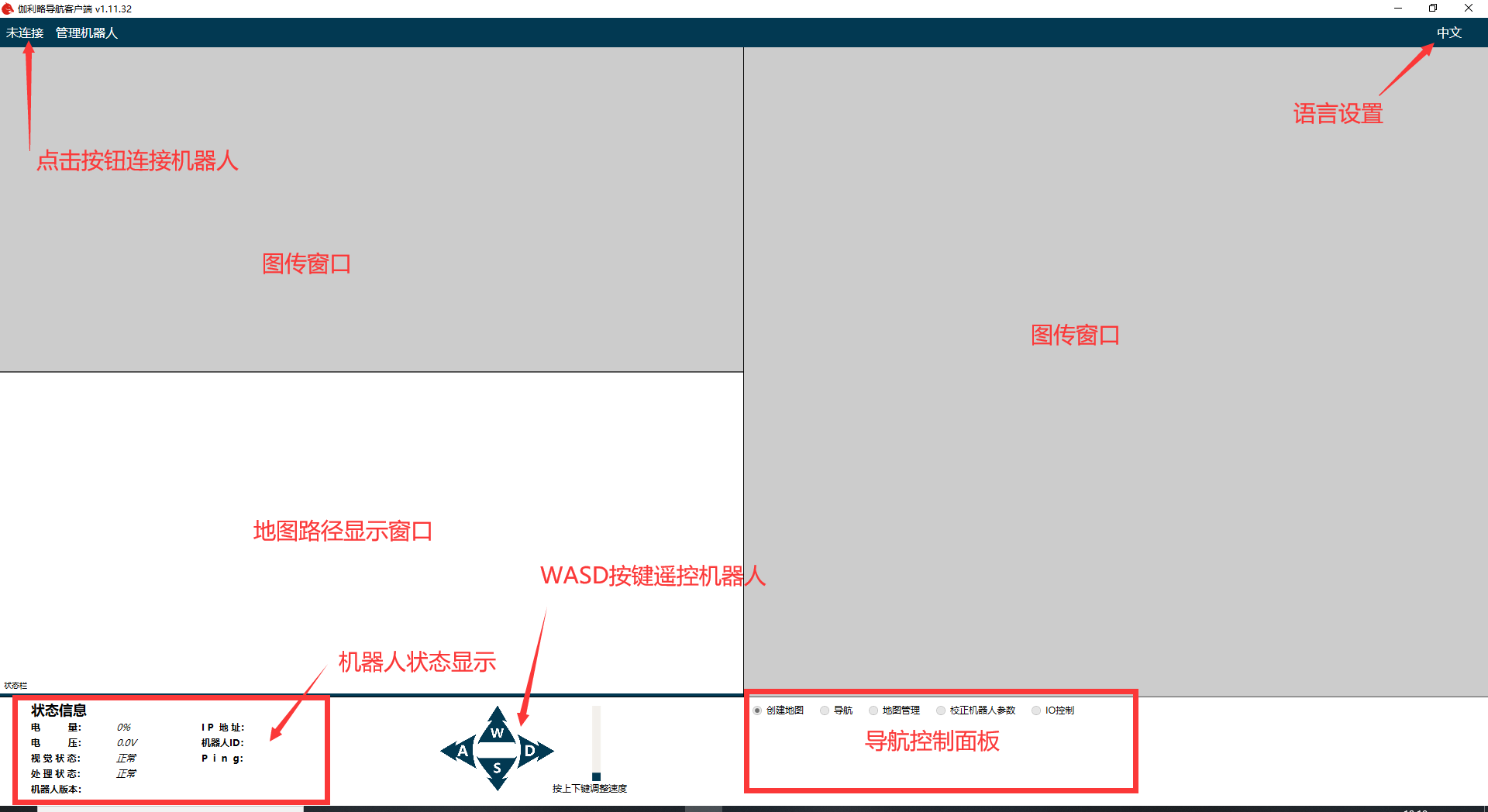
二、遥控图传
2.1 控制端电脑接入工作网路
控制端电脑需要和机器人在同一个无线网络下,控制软件的安装请参考第一章。 对于自带路由器的机器人可以直接把控制端电脑连接至机器人路由器。一般机器人默认WiFi名称为导航小车开头,密码为12345678。

2.2 控制端软件的操作
2.2.1 遥控图传的开启
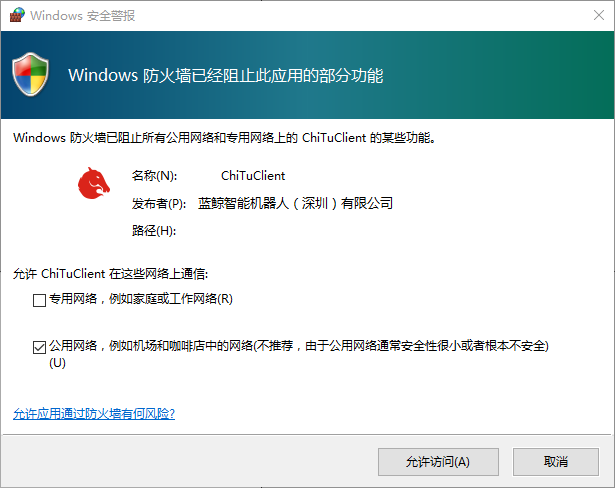
点击主界面上的“未连接”按钮,建立遥控端与底盘的通信链路,首次运行会弹出下图防火墙警告,请选择“允许访问”。如果没有弹出这个窗口,且客户端无法连接机器人,那么需要手动添加程序到防火墙规则。具体方法可以搜索一下。
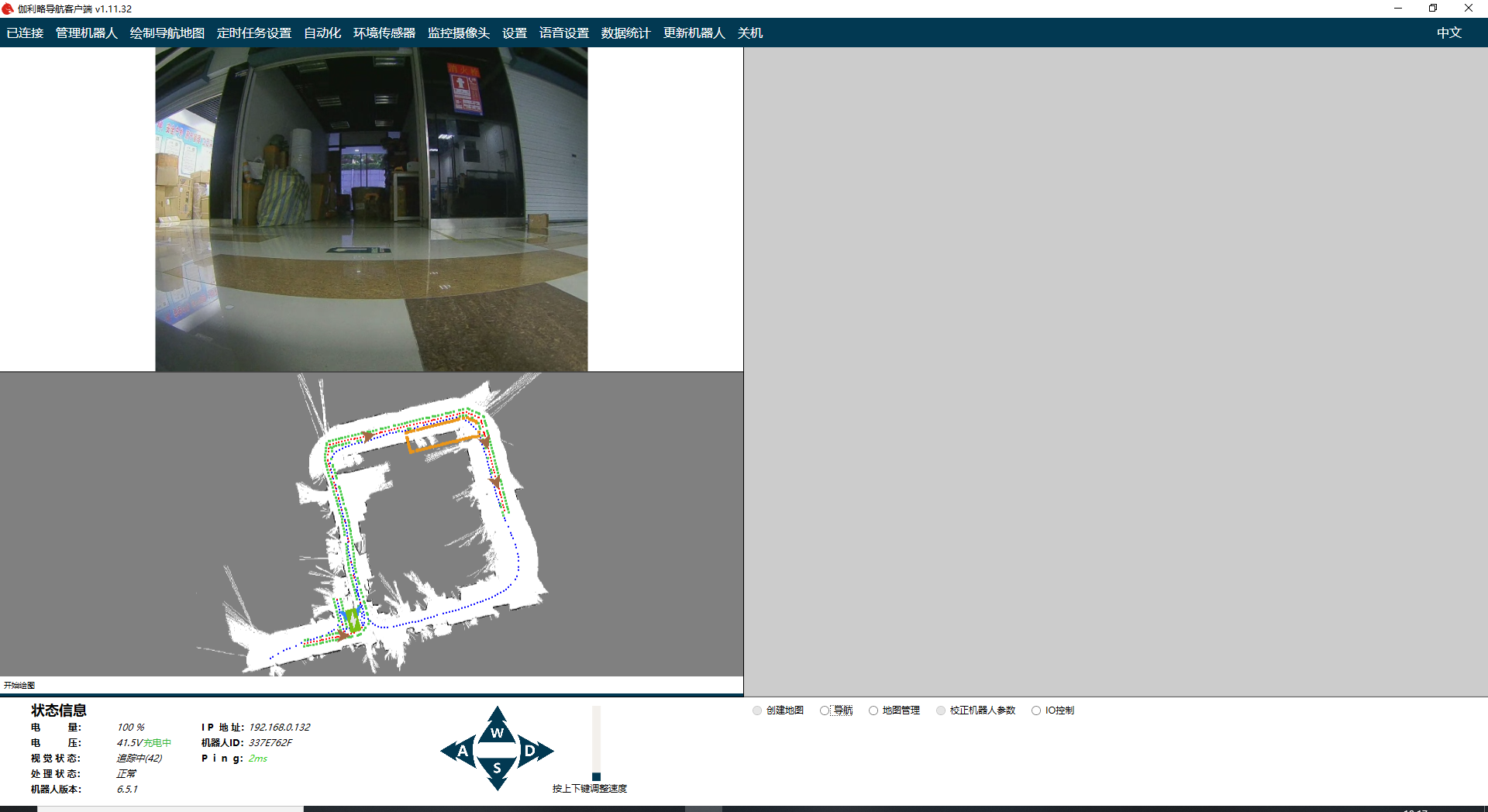
连接成功后,主界面变成下图所示,现在可以开始遥控底盘运动。
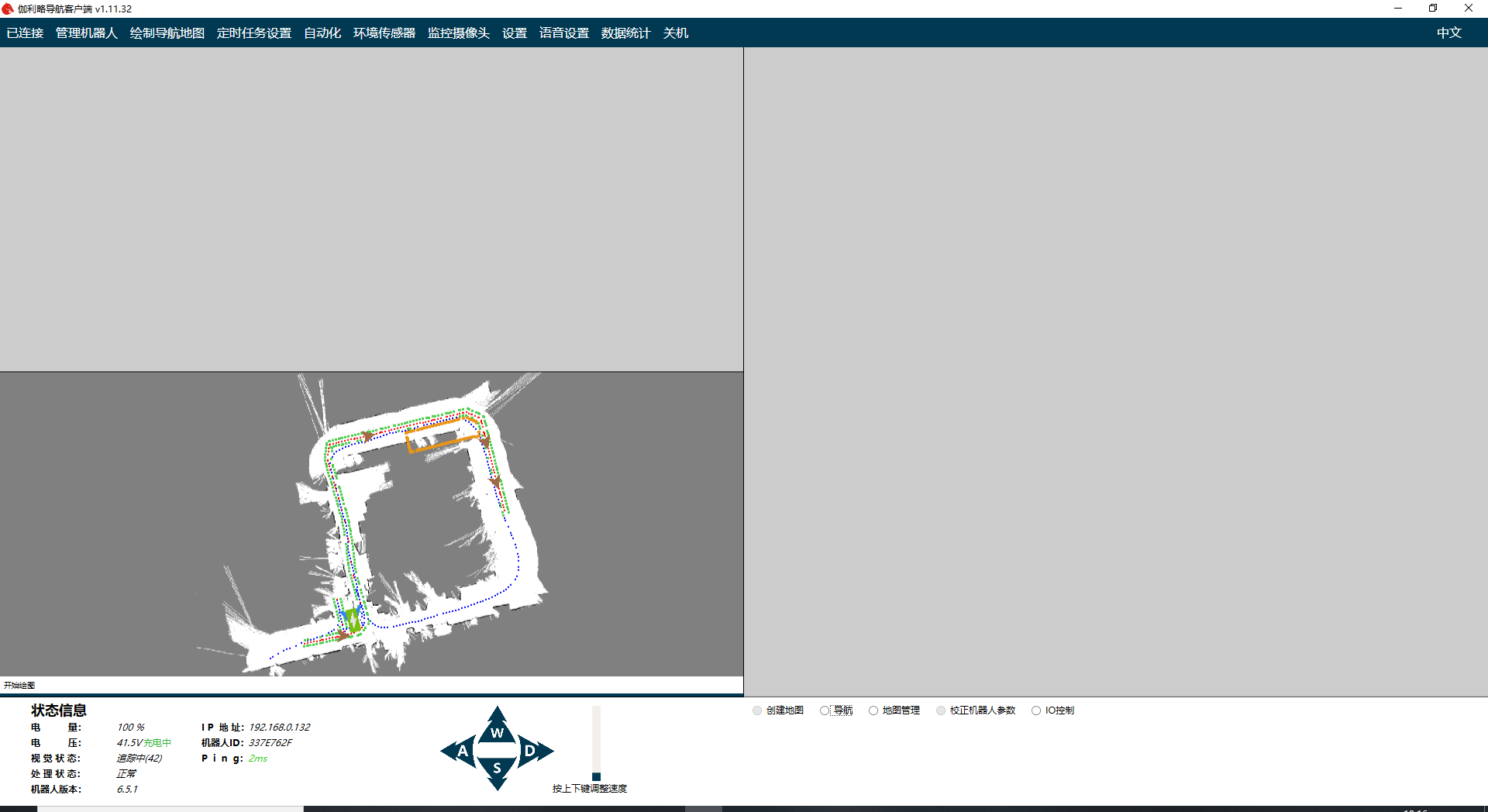
底盘运动控制支持键盘操纵,操作风格类似极品飞车游戏。WSAD控制上下左右,上下箭头控制速度档位。
在图传画面区域右键打开图传菜单,如下图
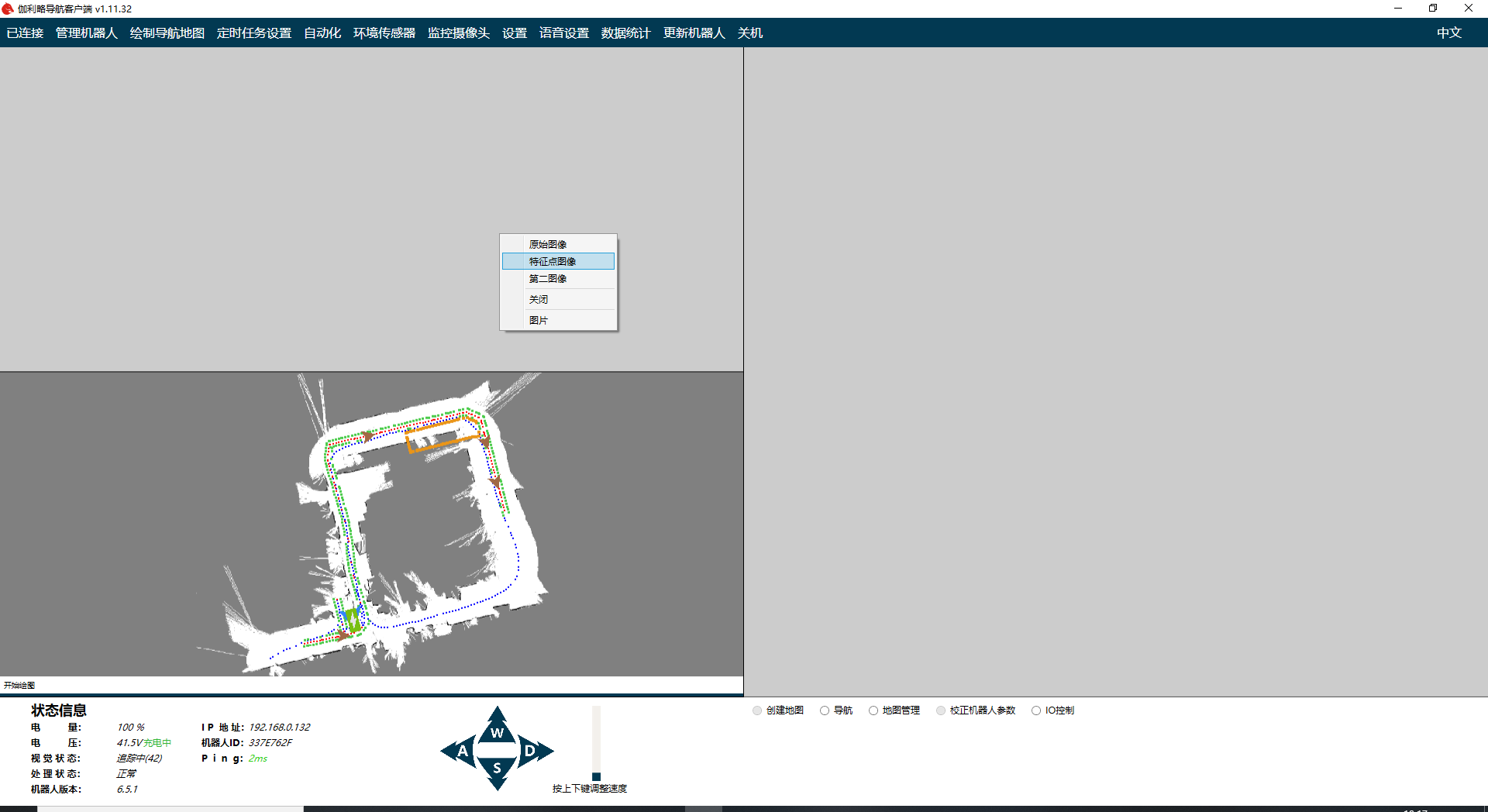
选择“原始图像”,现在可以看到机器人的第一视角画面,图传已经开启
在右键菜单中选择“关闭”,可以结束图传
对于有麦克风的机器人,图传的时候同时会传输声音。利用客户端上的远程喊话功能就可以实现远程双向通话。
2.2.2 图传遥控的关闭
直接关闭软件即可,如果需要关闭设备电源,请先点击主界面上的“关机”按钮使车载主机关机,再关闭车底盘数码管旁边开关,确保主机关机后(主机灯熄灭)再拔掉电池与车底盘接线。
2.2.3 跨局域网使用
通过GalileoPorxy服务我们可以实现跨局域网控制和访问机器人。设置方法可以参照此文档
设置好之后就可以实现机器人放在办公室,自己在家控制机器人等等。
本章演示视频: