机器人标定
在使用机器人的过程中,由于机器人组装时的误差。会导致程序内置参数和机器人实际参数存在误差,从而影响到机器人的定位和导航的精度。使用机器人标定工具可以对机器人参数进行标定,降低这部分误差从而提高机器人的定位和导航精度。
机器人的标定主要包含两个部分。一个是陀螺仪标定,一个是摄像头参数标定。如果机器人带有前后摄像头和激光雷达,还需要标定激光雷达。
演示视频
陀螺仪标定
陀螺仪是机器人用来短距离定位的设备。相当于人类的小脑。首先打开客户端,连接机器人。
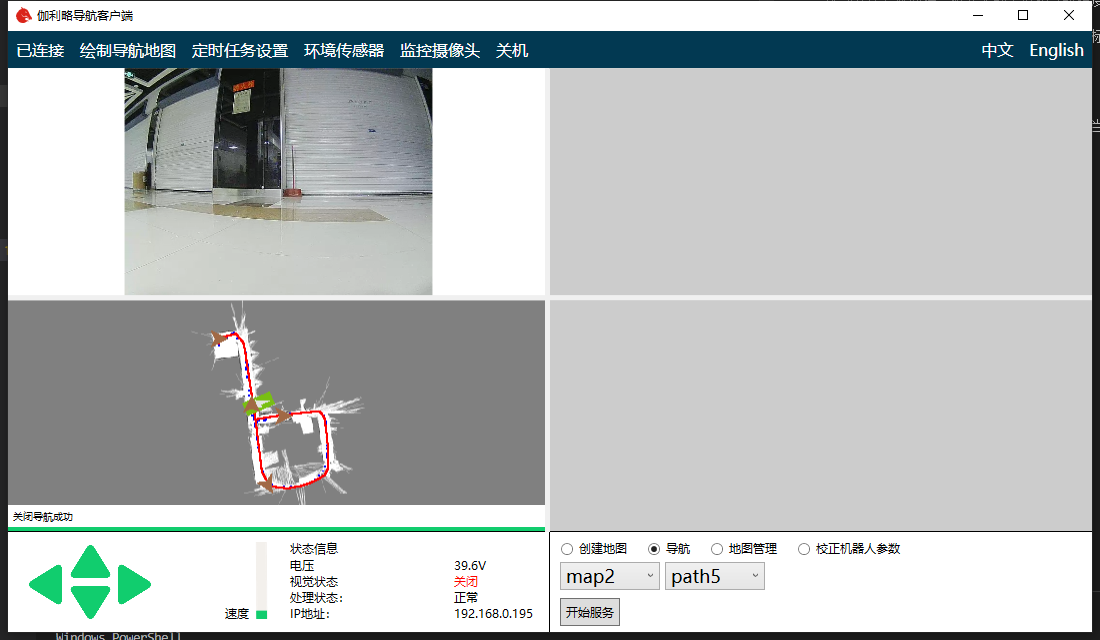
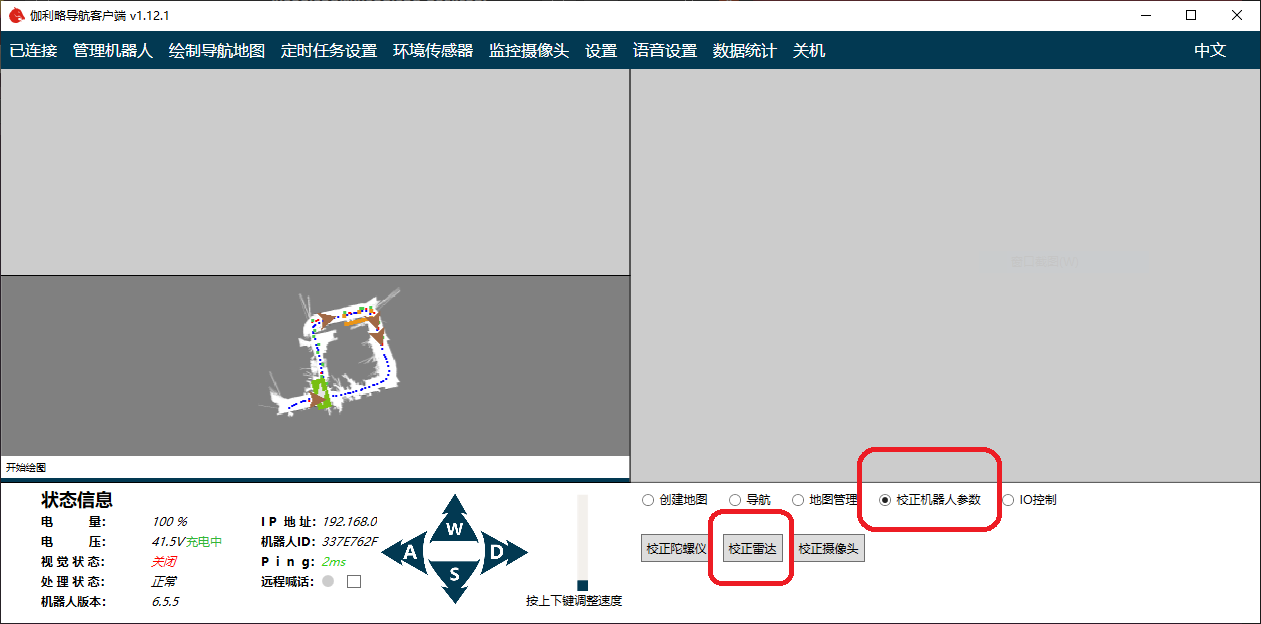
点击右下角的校正机器人参数

接着点击校正陀螺仪
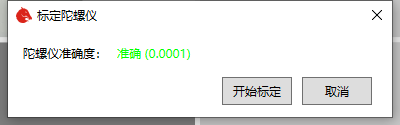
弹出标定陀螺仪窗口。此时窗口中会显示陀螺仪数据。此数值越小则说明机器人陀螺仪越准确。
点击开始标定即可标定。注意在标定过程中千万不能触碰机器人。这样会导致标定产生很大误差。整个标定过程可能需要两分钟。请耐心等待。
标定完成后即可关闭陀螺仪标定窗口。
同时标定前后摄像头
本模式只适合安装了前后摄像头的机器。
摄像头标定过程需要遥控机器人在环境中到处走动,所以在开始标定之前请保证能够有足够的空间供机器人移动。
点击右下角的校正摄像头按钮。选择“同时标定多摄像头”,弹出摄像头校正窗口。

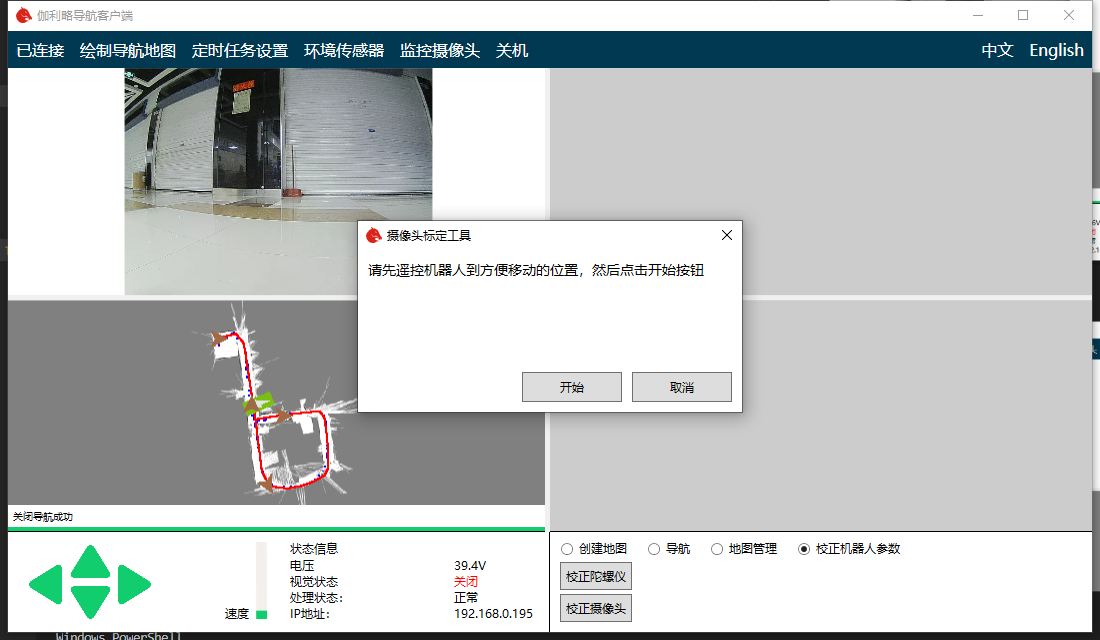
根据提示,遥控机器人到较开阔的位置。然后点击开始按钮。
此时机器人会进入建图状态。
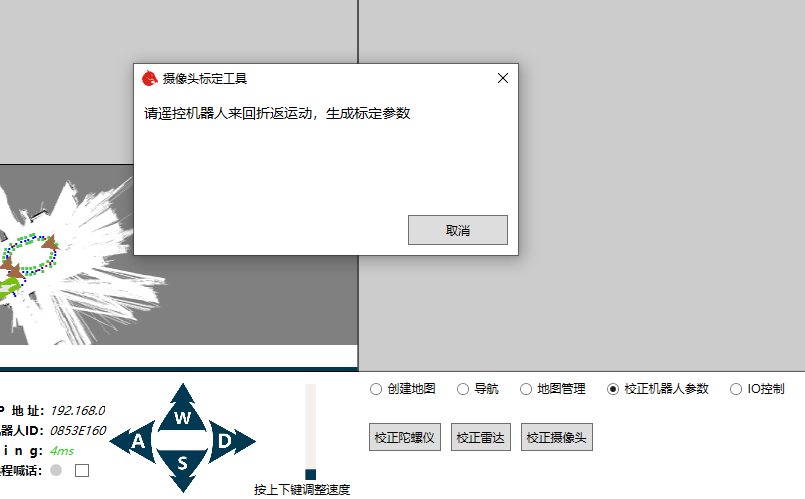
按照窗口提示,移动机器人前进三、四米远然后再掉头回来,完成折返运动。移动过程中机器人会自动计算出标定参数,和误差。

如果结果达到99%以上,同时机器人是在直行路段(转弯路段标定结果比较差),以及机器人至少完成了一次掉头折返运动。满足这三个条件,你可以选择接受结果,点击确认更新按钮即可。
至此摄像头标定完成。
标定单个摄像头
本模式适合只安装了一个摄像头的机器,安装了前后摄像头的机器请使用上文的同时标定前后摄像头步骤。
摄像头标定过程需要遥控机器人在环境中到处走动,所以在开始标定之前请保证能够有足够的空间供机器人移动。
点击右下角的校正摄像头按钮。选择需要标定的摄像头,弹出摄像头校正窗口。
根据提示,遥控机器人到较开阔的位置。然后点击开始按钮。
此时机器人会进入建图状态。

按照窗口提示,移动机器人形成一个闭环。

等待闭环完成,形成闭环后继续遥控机器人前进一段距离。此时机器人会自动计算出标定参数,和误差。
比较好的结果可以达到99%以上。你可以根据准确度决定是否接受标定结果。如果接受结果,点击确认更新按钮即可。
至此单个摄像头标定完成。
标定激光雷达
本模式只适合安装了前后摄像头和激光雷达的机器。
标定过程需要遥控机器人在环境中到处走动,所以在开始标定之前请保证能够有足够的空间供机器人移动。
点击右下角的校正雷达按钮,弹出激光雷达校正窗口。
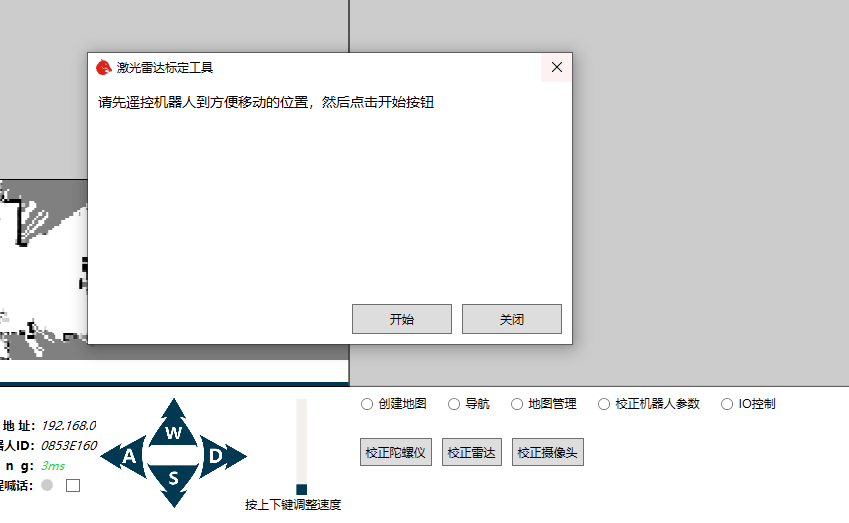
根据提示,遥控机器人到较开阔的位置。然后点击开始按钮。
此时机器人会进入建图状态。
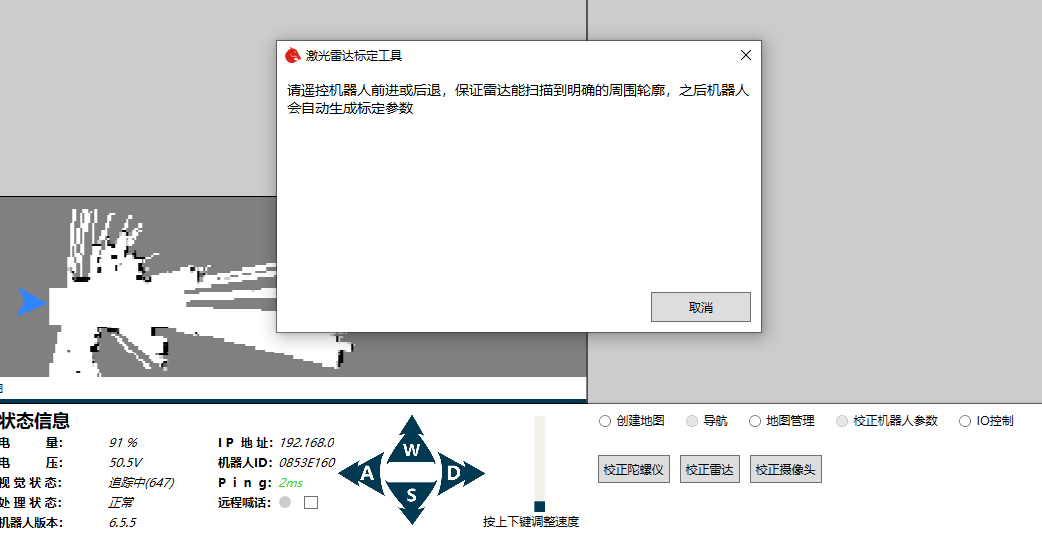
按照窗口提示,移动机器人持续前进或后退,注意要保证周围环境不要超过激光雷达扫描距离,可以在走廊里面移动。
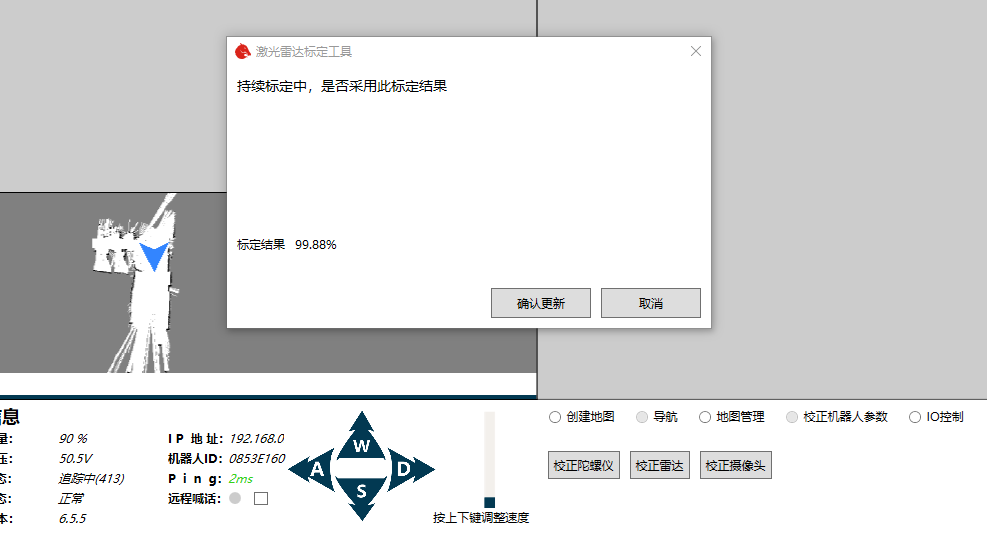
如果结果达到99%以上,同时机器人是在直行路段(转弯路段标定结果比较差)。满足这两个条件,你可以选择接受结果,点击确认更新按钮即可。
至此激光雷达标定完成。