机器人参数说明与设置
对应于不同的应用环境所需要的机器人的表现会有差别。比如有的场景需要机器人运动快一些,有的场景却需要机器人运动的更加平稳一些。机器人的表现都是由对应的参数确定的。通过机器人参数修改界面,我们可以轻松的修改机器人的参数从而让机器人更加适应我们的应用场景。
在连接机器人后点击上方导航栏中的设置按钮,打开机器人设置界面。

如果导航栏并没有设置按钮则说明机器人不支持设置参数。可以在更新机器人程序后再次尝试。
机器人设置界面如下
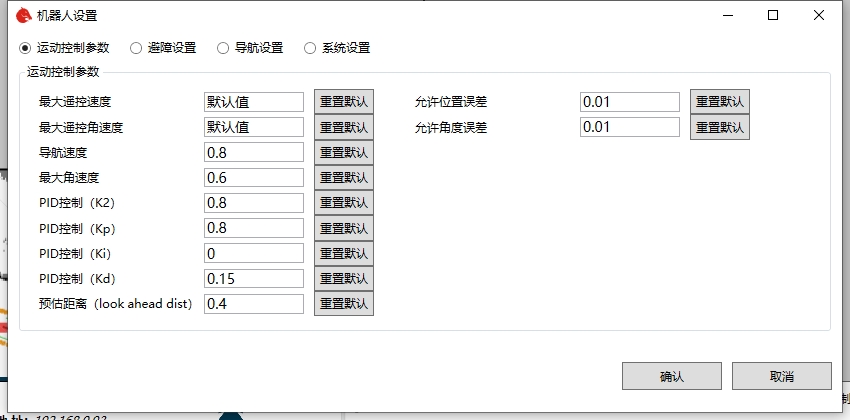
修改需要改动的参数然后点击确认即可更新机器人参数。
如果确认按钮为禁用状态说明机器人程序不支持参数修改功能,需要升级机器人程序后再次修改。
1.运动控制参数
最大遥控速度
客户端遥控机器人的最大直行速度,单位是米/秒,客户端当前遥控直行速度==最大遥控速度*当前设置的速度比例
最大遥控角速度
客户端遥控机器人的最大角速度,单位是弧度/秒,客户端当前遥控角速度==最大遥控角速度*当前设置的速度比例
导航速度
导航速度为机器人导航时的最大直行速度,单位为米/秒,如果导航速度相对于默认值变化不大可以直接修改。如果有比较大的变动则需要同时修改下面的几个PID控制参数。否则机器人可能会出现导航时摇摆不定,无法稳定导航的问题。
最大角速度
最大角速度为机器人导航时的最大转弯角速度,单位为弧度/秒。设置导航过程中的最大转动速度。
PID控制参数
机器人运动控制采用PID算法,K2, Kp, Ki, Kd即为相关的控制参数。如果你的PID控制算法比较熟悉可以按照一般的PID参数校调方法进行调整。如果不熟悉最好不要进行修改。
PID控制(K2)
单位:无量纲。表示路径弯曲度对前进速度的影响因子,值越大,转弯时前进速度越小。推荐取值范围0.3到2.0。值太小会导致入弯转弯速度过大,而冲出路径。
PID控制(Kp)
单位:无量纲。偏离路径时的PID比例控制因子。推荐取值范围0.3到2.0。值越大,回归路径的角速度会越大,过大的值会引发振荡使车左右摆动。值太小则会导致车转弯时偏离路径。
PID控制(Ki)
单位:无量纲。偏离路径时的PID积分控制因子。绝大部分情况下都不用调整该值。
PID控制(Kd)
单位:无量纲。偏离路径时的PID微分控制因子。推荐取值范围-1.0到2.0。这个值用来消除角速度振荡现象,值合适时可以消除车退出弯道直线行驶时的左右摆动。值不合适同时过大时则会加强左右摆动的振荡现象。
预估距离(look ahead dist)
单位:米。推荐设置成导航速度的一半大小,代表车运动时在前进方向的瞄准距离。值越大,对路径的贴合效果越差(在不绕开模式时会影响通行效率),但是速度会更流畅,左右摆动幅度更小。
允许位置误差
单位:米。控制车到达目标点时的半径误差,值越大站点重复精度越差,值太小则会引发站点振荡。一般取值0.05左右。
允许角度误差
单位:弧度。控制车到达目标点时的角度误差,值越大站点重复精度越差,值太小则会引发站点振荡。一般取值0.05左右。
避障设置
绕开模式
不绕开
机器人不会采取绕行动作,遇到障碍物会停止移动,直到障碍物消失后自动继续任务。
局部绕开
机器人会小范围尝试绕开障碍物,范围大概5米左右,绕不开时会停止移动,直到障碍物消失后自动继续任务。
全局绕开
机器人会在整体路网上重新做规划,然后尝试绕开,绕开范围很大。但是相对的对于小范围障碍物绕开就不太灵活。
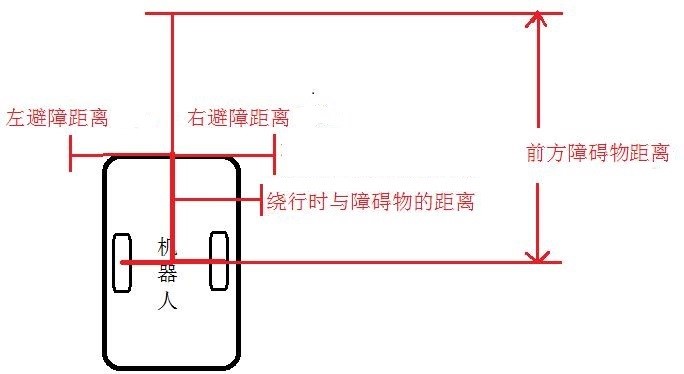
机器人半径
单位:米。只在绕行模式下才有效。对应上图中的“绕行时与障碍物的距离”,同时表示最小可通过路径的一半宽度(例如设为0.5米,表示最小通过宽度是1米)。这个值不能小于车的实际宽度的一半。
触发急停避障距离(触发紧急制动措施的距离阈值)
单位:米。当上图中的“前方障碍物距离”,即车与障碍物之间的安全距离,小于这个阈值时车无法向前移动,但是允许原地旋转。注意这个距离的起点在车主动轮中间。
避障最远检测距离(开始启动避障措施的距离阈值)
单位:米。当上图中的“前方障碍物距离”,即车与障碍物之间的距离小于这个阈值时,车会开始减速同时规划绕行路径。推荐设置范围1.5到2.5,注意这个距离的起点在车主动轮中间。
2.导航设置
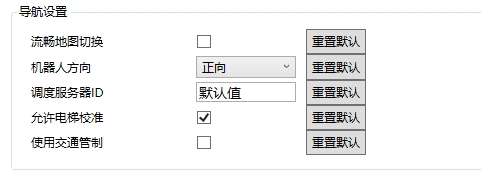
流畅地图切换
控制地图切换过程车的运动行为,勾选后切换时更流畅。
机器人方向
控制机器人导航时车速的正负,适用于双向来回运动的agv控制。正向 表示车以前进方式运动,反向 表示车以后退倒车方式运动,自动 表示由车自己根据当前环境决定是前进还是倒车移动。
调度服务器ID
当此值为空时,机器人会自动连接局域网内的调度服务器。当此值不为空时,机器人将通过galileo proxy连接到指定的调度服务器。
使用交通管制
暂未开启。默认当局域网内有调度服务器的情况下,开启导航时调度服务器已正常工作时,机器人会采用调度服务器的交通管制来控制机器人运动。
3.系统设置
低电量自动充电
勾选后启用低电量自动回去充电的功能,开启这个功能前需要先完成建好地图和设置充电桩位置。
建图类型
控制机器人建图导航时使用的算法,
雷达建图 表示使用单个激光雷达参与建图与导航
单摄像头建图 表示使用前摄像头参与建图与导航
单摄像头混合建图 表示前摄像头和激光雷达同时参与建图与导航
双摄像头建图 表示同时使用前后摄像头参与建图与导航
双摄像头混合建图 表示前后摄像头和激光雷达同时参与建图与导航
RTK建图 表示使用卫星定位方式建图
3D雷达建图 使用3D雷达算法建图导航
3D雷达导航 使用ndt算法利用3D雷达匹配进行导航。注意此模式只能导航不能建图。需要先再3D雷达建图模式下建好地图。此模式更适合里程计精度不高的场景。

使用预览版
勾选后启用预览版软件,不勾选则使用稳定版本软件,预览版功能更多,稳定版本则bug更少。推荐保持出厂设置状态。
设置返回充电百分比
低电量自动充电勾选后才生效,取值0到100,电池电量低于设定值时触发低电量自动充电动作。
设置关机电量百分比
取值0到100,电池电量低于设定值时触发低自动关机动作。
设置音量
用来修改机器人系统音量大小
微信ID
通过微信发送异常提示,如机器人被阻挡,导航异常。
启用UDP连接
勾选后启用UDP连接,默认使用TCP连接。UDP连接速度更快,但是不可靠,可能会丢包。如果出现客户端连接经常断开的情况可以尝试关闭UDP连接。
使用串口遥控器
勾选后启用串口遥控器功能。只有特定的设备支持此功能。请不要随意开启。
开发者模式
勾选后启用自动化图形编程等高级功能
允许更新机器人
勾选后当机器人有可用的软件更新时,机器人会在最上边菜单栏显示更新机器人按钮。
战斗模式
开启后增加战斗模式,增加对于射击云台等的控制。
使用vp8
视频图传的编码模式,如果启用将采用vp8编码方式。vp8更适合x86架构主控,默认会采用h264硬件编码。
任务完成等待返回时间
如送餐场景下,机器人到达餐桌后需等待的时间。当等待到预定时间后机器人会自动返回起点。
客户端报警
勾选后传感器数据异常时客户端会发出报警声音提示。
WiFi名称
需要机器人自动连接的WiFi名称。机器人会自动连接到此WiFi网络。
WiFi密码
需要机器人自动连接的WiFi密码。机器人会自动连接到此WiFi网络。