自动充电设置
1.充电桩位置的选择
对于带有自动充电功能的机器人,在使用自动充电功能之前,需要先放置好充电桩。首先保证充电桩靠墙摆放,因为机器人在自动充电对准过程中可能会向后推动充电桩。 其次在选择充电桩位置时,尽量选择充电桩对面环境固定的位置。因为在充电过程中机器人依靠摄像头定位,正面场景发生变化时可能导致定位误差增加,给充电过程增加难度。
2.调整充电桩高度
充电桩由于高度误差可能无法和机器人尾部完全贴合,需要调整充电桩高度,使其完全贴合。当然在大多数情况下,机器人出厂时已经做好调整。
3.设置充电桩位置
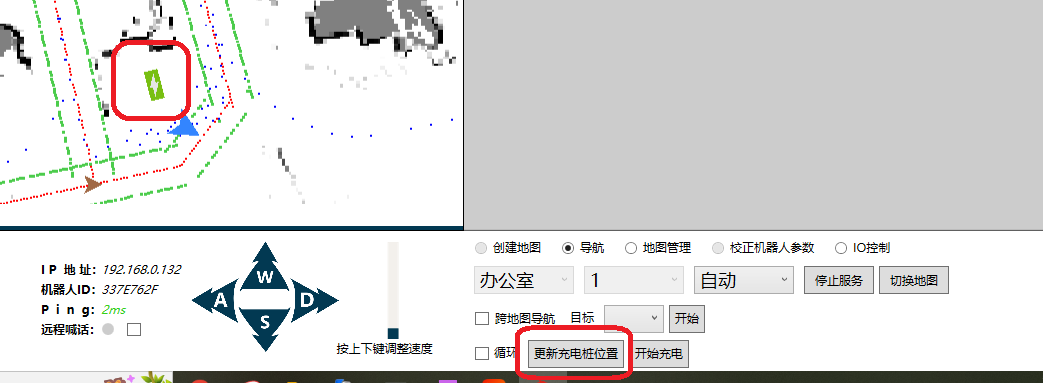
使用自动充电前需要先创建周围环境地图。创建地图时注意包含充电桩所在位置。地图创建完毕后,添加机器人的导航路径,然后选择对应路径开始导航。 在导航状态下遥控机器人使其尾部正对靠近充电桩(距离30厘米内),后摄像头能看到充电桩二维码。然后点击客户端中的保存充电桩位置或更新充电桩位置按钮。
此时客户端上显示的地图会增加充电桩位置标志。注意导航系统需要完成初始化后,才能保存充电位置。
保存完成后,点击停止导航。在绘制路径界面中添加到充电位置的路径。
4.开始使用
在以上步骤设置完成之后,选择对应的地图和路径然后开始导航。在导航成功初始化之后,点击客户端中的开始充电按钮,就让就会自动对准充电桩充电了。
5.低电量自动充电
在机器人电量过低时,机器人可以自动返回充电。如果机器人没有在导航状态,机器人会自动开启导航,然后返回充电。低电量回充功能默认没有打开,需要在客户端中的机器人设置打开对应的功能。机器人回充的最低电量默认为5%,可以自己修改。