原理介绍
整个软件分为两个主要部分。一个是运行在位于公网的服务器上的服务程序。另一个是运行在机器人本地的服务程序。整个软件的结构如下图所示
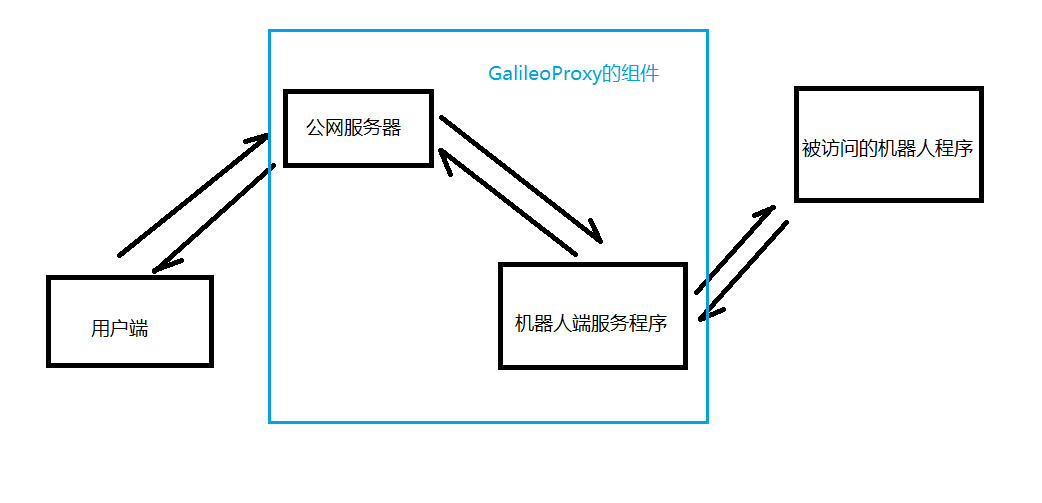
用户端直接访问公网服务器,然后公网服务器会把用户的请求转发至位于机器人的机器人端服务器程序。再由机器人端的服务器程序转发请求到机器人需要被访问的程序。同样机器人的程序响应通过相反方向再传递给用户端。
从用户的角度看来,自己并不用了解整体的结构。看起来就像是机器人被分配了一个固定域名一样。比如机器人的ID是08E14DF3DE3DFA8CAE8307BBEA096743F396FDD38AD38A10ADA24B75353D4C4987F2CAA099A6。如果我们想要访问机器人的80端口那么只要访问下面的地址就行了
http://08E14DF3.80.robot1.bwbot.org:10427
当然为了安全起见可能还需要增加token之类的参数。整个url的格式为
{机器人ID前8位}.{端口号}.robot1.bwbot.org:10427
其中robot1.bwbot.org:10427也可以换成你自己的运行着GalileoProxy服务程序的公网服务器。后续会有文档说明如何配置。