Test the motor phase and Hall wire wiring sequence
For this drive, theoretically any motor phase wire wiring, there is a set of corresponding Hall wiring to make the motor operate normally, so you can first arbitrarily specify the motor phase wiring sequence, here we specify mA to connect the motor yellow wire, mB to connect the motor green line, mC to connect the motor blue line; The following describes how to determine the Hall line order.
When the Hall line sequence is incorrect, the driver needs to be set to "speed open-loop mode", and the value of the speed should not be greater than 20, which can prevent abnormally high current from damaging the motor coil and drive tube. The line sequence of the two motors is the same, that is, the motor lines and Hall lines of the left wheel and the right wheel are in exactly the same order, so the following test is only for the left wheel motor.
Velocity Open Loop Mode
Click "open loop", the drive will temporarily enter the "speed open loop" control mode, at this time, the motor PWM switch value is directly proportional to the speed command. Restarting the drive will cause the drive to exit the "speed open loop" control mode and enter the default speed closed loop mode.
Determining the Hall Line Sequence
Make sure that the driver is in the "speed open loop" mode. Taking the left motor as an example, it is assumed that the colors of the three Hall wires of the motor are yellow 1, green 2, and blue 3 respectively.
| Hall wire interface | order 1 | order 2 | order 3 | order 4 | order 5 | order 6 |
|---|---|---|---|---|---|---|
| HA | Y1 | Y1 | G2 | G2 | B3 | B3 |
| HB | G2 | B3 | Y1 | B3 | Y1 | G2 |
| HC | B3 | G2 | B3 | Y1 | G2 | Y1 |
Try the 6 wiring sequences in the above table in turn, for each wiring sequence:
a. Set speed 10% to see if the motor runs smoothly. If it is not normal, the sequence of this group is wrong, please "zero" and then test the next group of wiring; if it is normal, perform operation b.
b. Set speed -10% to see if the motor runs smoothly. If it is not normal, it means that the sequence of this group is wrong, please "zero" and then go back to a to test the next group of wiring; if it is normal, it means that the Hall line sequence is correct , continue to step c.
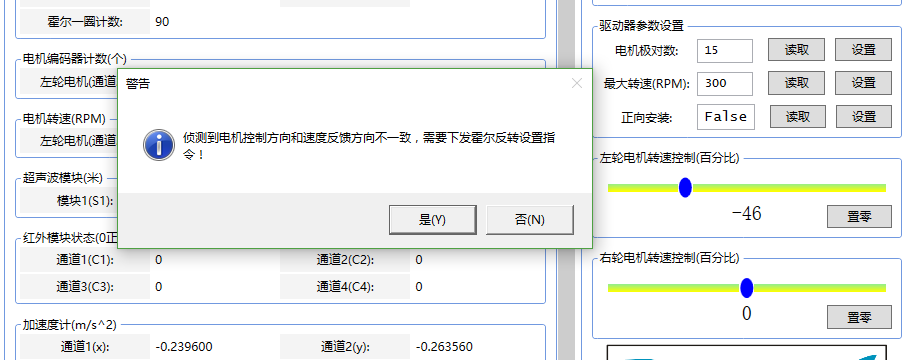
c. Now the motor can basically run normally. Finally, it is necessary to make sure that the direction of the control speed and the direction of the speed feedback are consistent. For example, if the control speed greater than zero is sent, the speed should normally return to a speed greater than zero, so that the speed can be closed-loop. First increase the speed control amount in the forward direction, so that the speed is greater than 200RPM or less than -200RPM; then increase the speed control amount in the reverse direction, and also make the speed greater than 200RPM or less than -200RPM. After the operation is completed, the software will automatically determine whether the control direction is opposite to the direction of the speed. If the prompt shown in the figure below appears, press "Yes". If it does not appear, it means that the debugging has been completed and the speed closed-loop test can be continued.
closed-loop speed control test
According to the Hall line sequence determined in the previous section, connect the right wheel motor to the driver, then restart the driver, and wait for the driver to be initialized. Now arbitrarily adjust the slider in the figure below to set the motor speed.
While controlling, you can also observe the speed feedback value.

Adjust the forward rotation direction of the motor
On the premise that the speed closed-loop control is successful, if it is found that the forward rotation direction of the motor is opposite to the direction you need, first judge whether the installation direction is set correctly according to Section 3.3. If the installation direction is set correctly, then adjust the ma and Mb of the motor phase line. , At the same time, the HA and HC of the Hall line are reversed, so that the forward rotation direction of the motor can be reversed.