导航送货功能
我们可以通过平板程序控制机器人送货任务。设置送货的目的地等等。
在送货之前我们需要先给机器人创建好地图,然后设置路线。具体操作可以参考创建地图的说明。
按照基础操作里面的说明,连接机器人并进入任务列表界面。

在这个界面中,每一个按钮代表着一个位置。
首先点击想要机器人依次送货的目标点,最下面的出发按钮。机器人就会自动开始送货了。送货的顺序就是之前点击的目标点的顺序。在送餐模式下送货完成后机器人会自动回到厨房。
在送餐模式下,没有点击桌号,直接点击最下面出发按钮,机器人会自动返回厨房。
启动成功后界面如下图所示
![]()
左侧按钮为暂停按钮。点击后机器人会暂停移动。暂停后的界面如下图所示
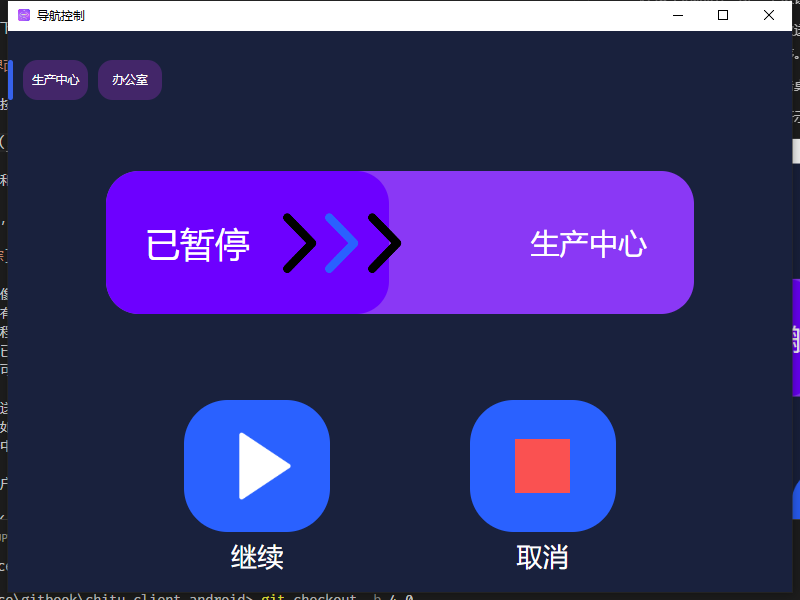
这两个为继续任务和取消任务按钮。点击按钮对应继续和取消任务。
在送餐模式下,机器人到达目标送餐位置时,机器人会语音提示用户在取餐后触摸开关。用户触摸开关后机器人会自动返回厨房。如果用户一直未触摸开关机器人会等待一分钟,之后自动返回厨房。等待时间也可以在电脑客户端中进行设置。
除了触摸开关,用户也已触摸平板返回按钮。触摸后机器人会自动返回厨房。
