更新地图
在实际的使用过程中,由于场景变化可能会出现之前建立的地图很多地方容易丢失,导航不稳定的问题。这时候需要更新地图之后在使用。随着更新地图次数的增加地图也更加稳定可靠。
首先确保之前已经成功创建过地图。然后将客户端连接至机器人路由器,并按照基础操作里面的说明连接机器人。
连接成功后点击左侧菜单栏

在弹出的菜单中选择更新地图选项
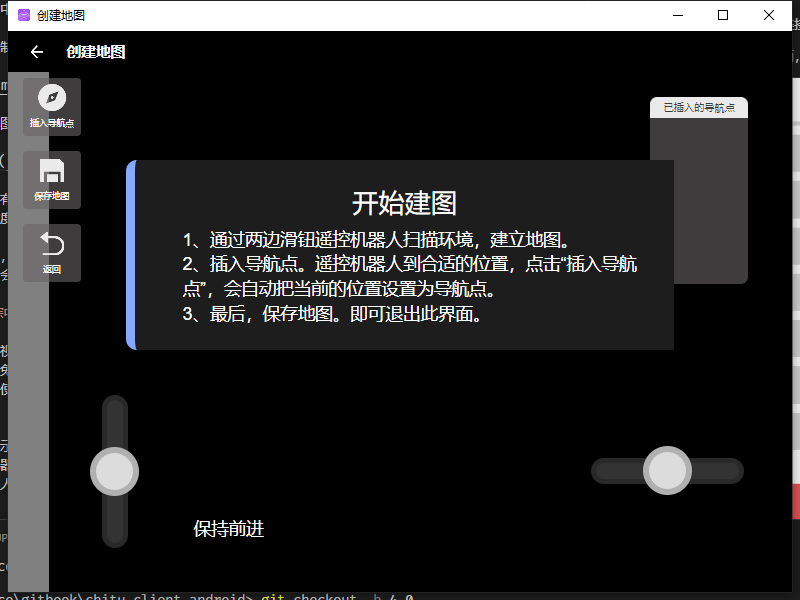
在更新地图刚启动时机器人需要切换到建图模式,同时载入之前建立的地图。如果之前建立的地图比较大可能载入速度会相对较慢。请等待载入进度图标消失后再操作。
载入完成后,遥控机器人移动到之前建立过地图且现在仍能够稳定追踪的位置。更新地图的过程和建图过程也很类似。也是遥控机器人在周围环境走一走。具体的移动要求可以参考建图说明。