1. 调度任务管理
一个调度任务就是控制某个机器人移动到某个位置然后完成某动作。我们可以通过系统界面方便的发布调度任务。
1.1. 发布调度任务
在启动调度系统之后,点击右侧的发布调度任务按钮。此时底部面板会变成调度任务发布面板。

在设置好对应的任务信息之后,点击提交按钮。调度任务就会被添加到系统的队列之中。
比如现在我们想要机器人移动到最上方的充电桩位置。首先点击底部面板最左边的目标坐标文本框,然后在地图上点击充电桩所在位置。
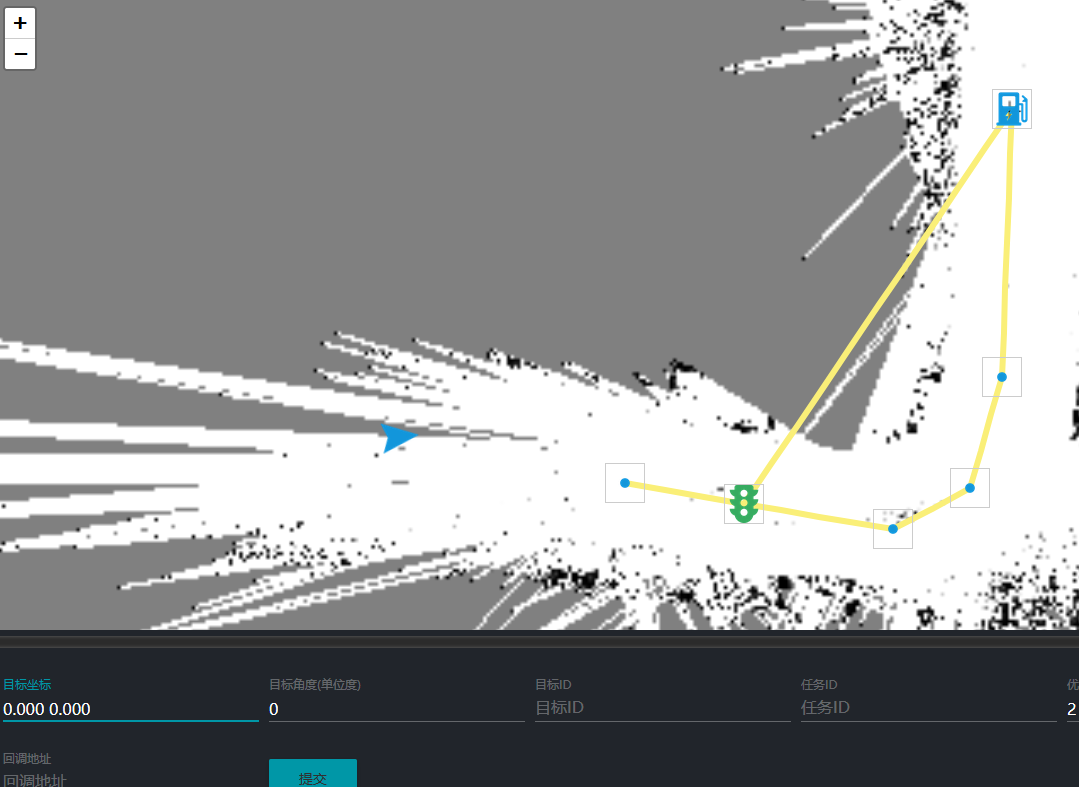
点击后点击提交按钮,如果一切正常,现在机器人就会自动向目标点移动了。
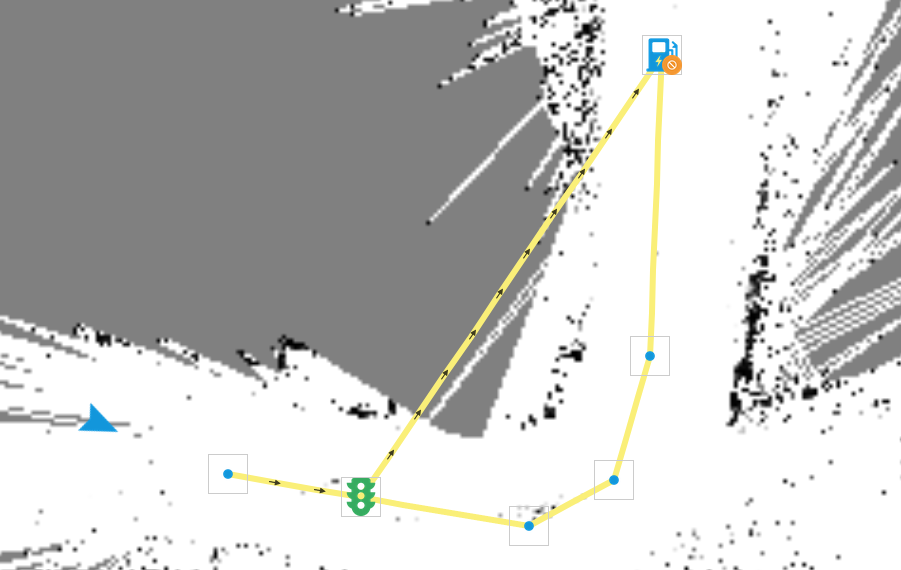
其中带箭头的路线即为调度系统为机器人机器人分配的路线。
1.2. 取消调度任务
在机器人执行调度任务的时候,右侧的调度状态栏会显示当前执行的任务。点击其中的取消按钮即可取消任务。
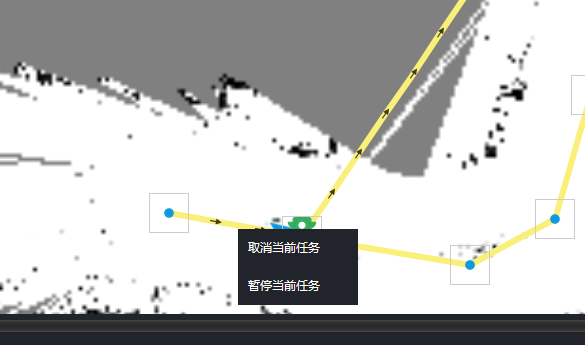
如果需要取消机器人当前执行的任务,也可以右键点击地图上的机器人图标。在弹出的菜单中选择取消当前任务
1.3. 暂停和继续调度任务
暂停和继续任务的操作方式和取消任务类似,也是点击右侧的调度任务状态按钮。当任务处于不同的状态时会显示出不同的颜色。
1.4. 返回待机
当机器人处于空闲状态时,可以右键点击机器人图标在弹出的菜单中选择返回待机选项
1.5. 返回充电
同样如果需要机器人返回充电,也可以右键点击机器人图标,选择菜单中的返回充电按钮。
1.6. 配合GalileoAPI使用
在调度系统开启后,对于已经激活的机器人,可以通过伽利略导航客户端开启导航。客户端选择地图和路径时选择和调度服务器一致的地图路径。剩下的操作和单台使用完全一样。
机器人在开启导航后,如果检测到调度服务正在运行会有语音提示启用调度系统。此时即使通过伽利略客户端发布导航任务也可以实现多台避让路径规划。
如果机器人当前导航地图或路径和调度服务器不一样。机器人的坐标仍然会在调度地图上显示,但是会以红色图标显示。