1. 创建和上传地图
1.1. 创建地图
创建地图使用伽利略导航客户端。具体的地图创建方法参考伽利略导航客户端手册
地图创建完成后即可关闭伽利略客户端。
1.2. 激活机器人
在调度系统主界面中,点击左侧的机器人按钮。此时主界面中会显示当前局域网内的机器人。
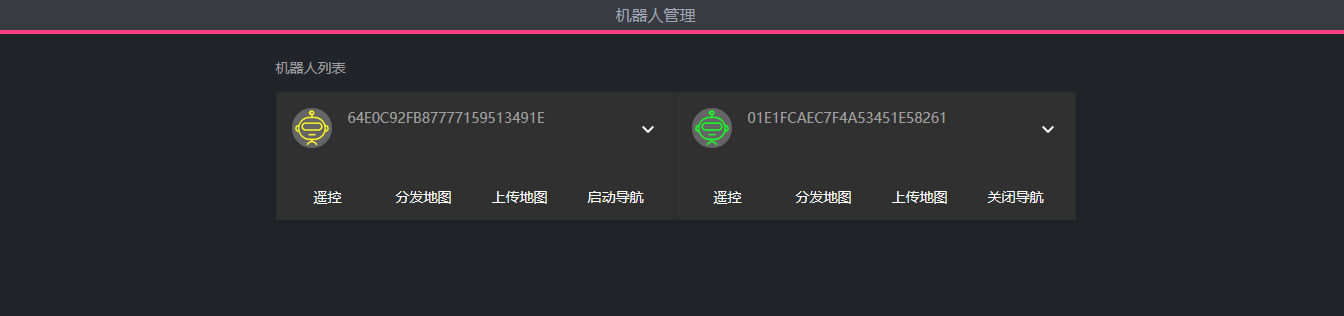
其中灰色代表不在线的机器人。黄色表示未激活的机器人。绿色表示已经激活的机器人。机器人只有在激活后才能被调度系统控制管理。
点击向下的三角,展开机器人控制面板
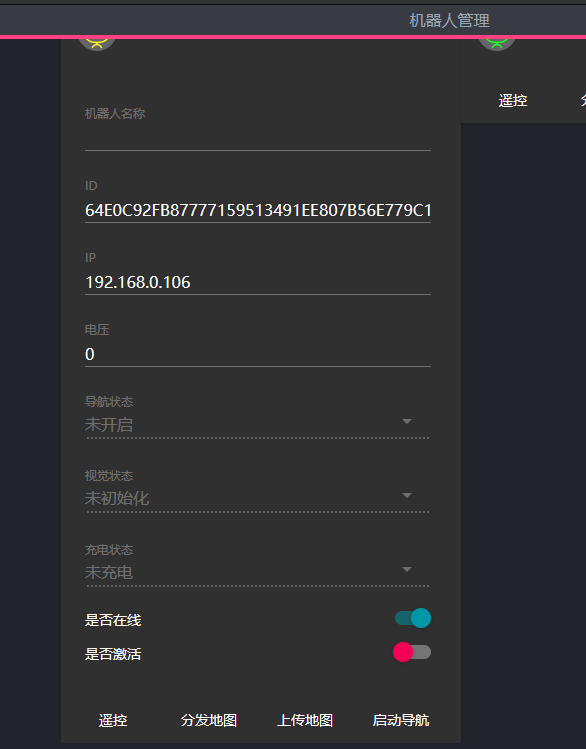
点击下面的是否激活状态按钮。此时机器人即被激活了。
对于使用云服务器的情况,机器人不会自动在机器人管理中显示。首先需要把调度服务器的ID设置到机器人中。 用伽利略导航客户端连接到机器人,并打开机器人设置界面。如下图所示
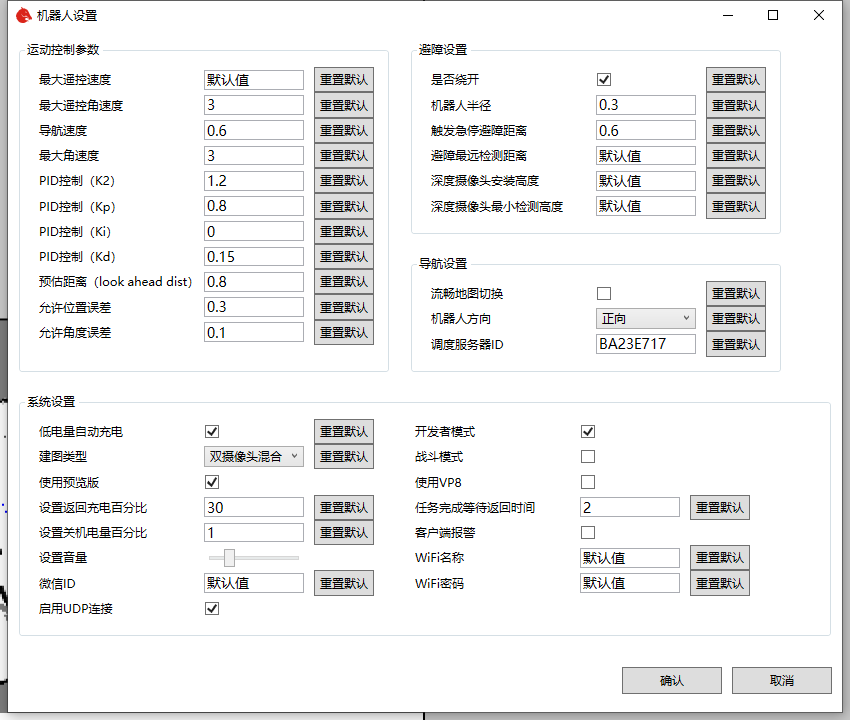
在导航设置,调度服务器ID中添加自己的云服务器ID。云服务器ID是云服务器地址的前八位。如http://7ce230e1.24958.robot1.bwbot.org:10427对应的ID就是7ce230e1。
添加后过几秒就可以在机器人管理中看到机器人了。剩余操作和局域网机器人一样。
1.3. 上传地图
点击机器人上传地图按钮即开始上传。上传地图时会把机器人之前创建的地图上传到服务器中。
1.4. 分发地图
点击机器人面板中的分发地图即可分发地图。分发地图时会将地图从服务器复制到目标机器人,用于机器人之间共享地图。
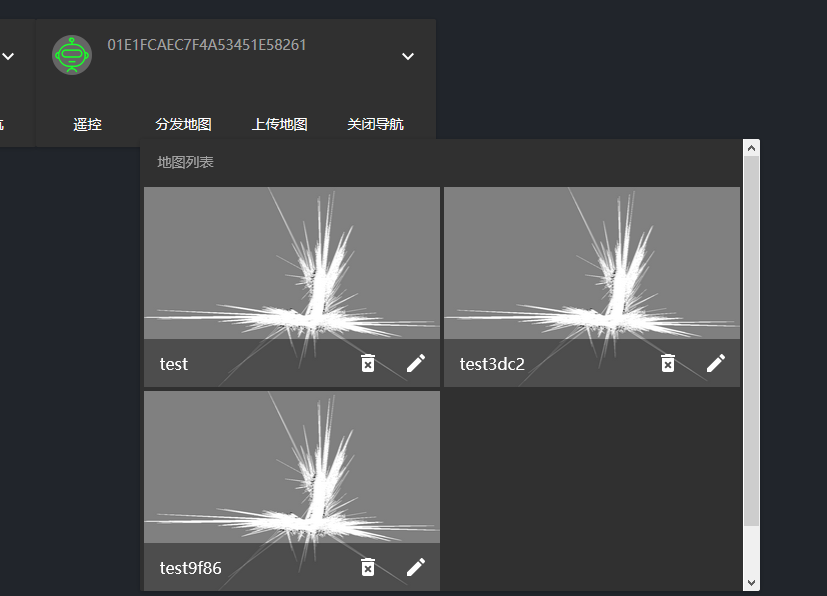
从地图中选择要分发的地图。
等待分发地图完成
1.5. 查看地图
地图上传完成后可以通过地图查看面板查看地图。点击左侧的地图管理选项,然后选择查看和修改。
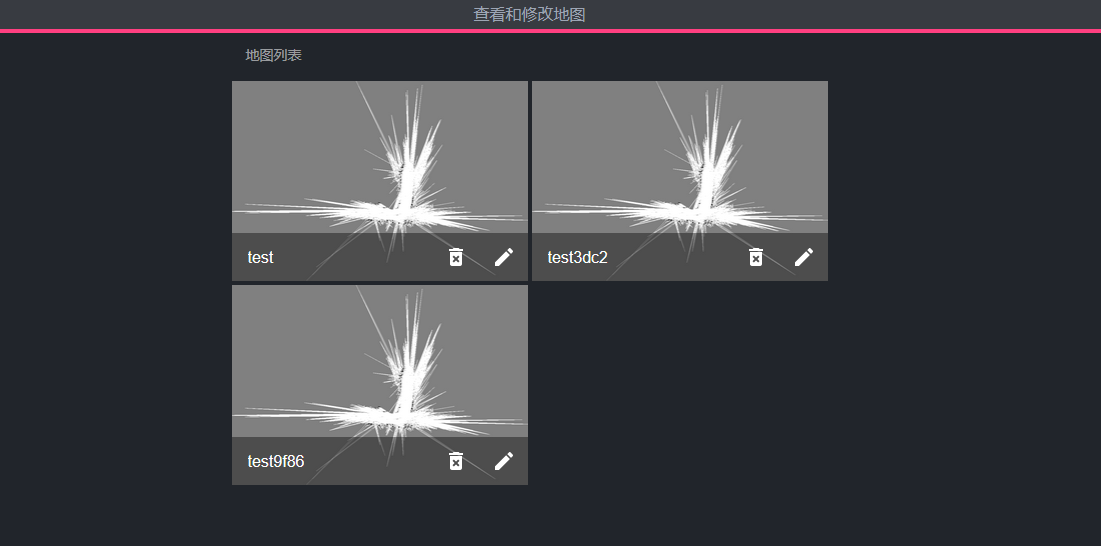
界面中会列出当前服务器中所有的地图。你可以点击对应的按钮进行删除和重命名操作。