伽利略导航系统HTTP协议说明
程序实例
API的格式为API版本号加上对应的URL,以获取系统状态API为例,实际请求地址为/api/v1/system/status。API返回值都是json格式的数据。下面的文档将省略API前缀。API服务程序默认端口为3546。 机器人在启动后会向局域网发送UDP广播,端口为22002。通过此广播我们能够获取到局域网中的机器人基本信息。下面是一个具体的广播数据例子
{"id": "F072E1BA8162245572D2FAEEB2526C5DD916F5A0D6D0F8A14B67FA43DC501079461280B15BA5", "port": 3546, "mac": "00:e0:4c:68:6f:0f", "version": "5.0.0"}
广播数据包含了机器人ID,机器人Http服务端口号,机器人mac和机器人当前的http服务版本号。
对于Http调用的参数,GET和DELETE方法的参数放在URL query string里面。POST和PUT方法的参数放在body里面。
对于HTTP协议不熟悉的用户可以先参考这个文档
跨局域网调用API
通过伽利略网络代理我们可以实现远程跨局域网的机器人API调用
HTTP 服务的参数配置
http服务参数配置文件位于 /home/xiaoqiang/Documents/ros/src/galileo_api/config.json
其默认内容如下
{
"username": "admin",
"password": "admin",
"allow_update": true,
"no_token_check": true,
"auto_charge": false,
}
| 参数 | 类型 | 说明 |
|---|---|---|
| username | string | 获取机器人token时的用户名。默认为admin |
| password | string | 获取机器人token时的密码。默认为admin |
| allow_update | bool | 是否允许自动更新。当为true时程序有更新时客户端会收到机器人更新提示。反之则不会有更新提示。 |
| no_token_check | bool | 是否开启token验证功能。默认不开启 |
| auto_charge | bool | 是否开启低电量自动充电功能,默认不开启。注意开启此功能要保证机器人导航地图中有正确的充电桩位置,同时导航地图能够正常工作 |
token API
为了系统的安全性,在调用机器人api的时候可以加上token验证的功能。此功能默认关闭,可以通过配置http api参数打开此功能。
URL: /token
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| username | string | 配置文件中的用户名,默认为admin |
| password | string | 配置文件中的密码, 默认为admin |
返回值
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功获取token |
| token | string | 获取的token |
获取token后在调用api时可以在url参数中加入token=xxx,xxx为你的token数据。 对于POST或PUT请求,token参数可以加在url中也可以在body的json数据里面。
下面是一个调用的例子
http://192.168.0.132:3546/api/v1/system/info?token=28b1c500400611ebb805493c9303c705
其中192.168.0.132为机器人IP,28b1c500400611ebb805493c9303c705为机器人token。
系统状态API
获取系统当前状态
URL: /system/status
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 状态String,可能的值为 Mapping, Navigating, Busy, Free |
说明:系统可能处在互斥的几种状态中。通过不同的操作API系统在不同的状态间切换。只有在特定的状态下系统才能执行特定的API。
获取系统基本信息
URL: /system/info
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| battery | int | 电池电量百分比 |
| camera_rgb | int | rgb摄像头topic发布频率,0代表没有数据 |
| camera_depth | int | 深度摄像头topic发布频率,0代表没有数据 |
| odom | int | 编码器topic发布频率,0代表没有数据 |
| imu | int | IMU topic的发布频率,0代表没有数据 |
| driver_port | bool | 急停按钮状态,true为按下,false为未按下 |
| charge | bool | 是否正在执行充电任务 |
| loop | bool | 是否正在执行循环任务 |
| info | object | 机器人基本信息,4.5.0和5.1.0之后版本才会有此返回 |
说明: charge状态和galileo_status中的状态并不一样。charge状态是整个充电任务的状态而galileo status中的充电状态为局部充电任务状态。
示例返回
{
"battery": 100,
"camera_rgb": 19,
"camera_depth": 29,
"odom": 26,
"imu": 49,
"camera_processed": 30,
"driver_port": false,
"info": {
"version": "6.1.5",
"code_name": "chitu-noetic",
"id": "AE13B83EE2846276882EE47A99391C89CD2EF6B6878D5D309F80755F8E3B7D15CB0CB9BEF55D",
"mac": "00:15:00:b9:90:a6",
"port": 3546
},
"charge": false,
"loop": false,
"slam_type": "camera"
}
注意第一次调用时,由于需要对数据统计,可能对应的数据返回为0.之后调用返回数据将为正常
获取Galileo Status
URL: /system/galileo_status
请求方式: GET
请求参数: 无
返回参数:当前的galileo status数据, galileo status是对系统整体状态的一个汇报参数。具体定义如下
例子
{
"header": {
"seq": 542928,
"stamp": {
"secs": 1624970817,
"nsecs": 524690511
},
"frame_id": "map"
},
"navStatus": 0, // 导航服务状态,0表示没开启closed,1表示开启opened。
"visualStatus": -1, // 视觉系统状态,-1标系视觉系统处于关闭状态,0表示没初始化uninit,1表示正在追踪tracking,2表示丢失lost,1和2都表示视觉系统已经初始化完成。
"mapStatus": 0, // 建图服务状态,0表示未开始建图,1表示正在建图
"gcStatus": 0, // 内存回收标志,0表示未进行内存回收,1表示正在进行内存回收
"gbaStatus": 0, // 闭环优化标志,0表示未进行闭环优化,1表示正在进行闭环优化
"chargeStatus": 0, // 充电状态,0 free 未充电状态, 1 charging 充电中, 2 charged 已充满,但仍在小电流充电, 3 finding 寻找充电桩, 4 docking 停靠充电桩, 5 error 错误
"loopStatus": 0, // 是否处于自动巡检状态,1为处于,0为不处于。
"power": 37.05362319946289, // 电源电压v。
"targetNumID": -1, // 当前目标点编号,默认值为-1表示无效值,当正在执行无ID的任务是值为-2,比如通过Http API 创建的导航任务。
"targetStatus": 0, // 当前目标点状态,0表示已经到达或者取消free,1表示正在前往目标点过程中working,2表示当前目标点的移动任务被暂停paused,3表示目标点出现错误error,默认值为-1表示无效值。
"targetDistance": -1, // 机器人距离当前目标点的距离,单位为米,-1表示无效值,该值的绝对值小于0.01时表示已经到达。
"angleGoalStatus": 1, // 目标角度达到情况,0表示未完成,1表示完成,2表示error,默认值为-1表示无效值。
"controlSpeedX": 0, // 导航系统计算给出的前进速度控制分量,单位为m/s。
"controlSpeedTheta": 0, // 导航系统计算给出的角速度控制分量,单位为rad/s。
"currentSpeedX": -0.0000010095536708831787, // 当前机器人实际前进速度分量,单位为m/s。
"currentSpeedTheta": 0.0002659947786014527,// 当前机器人实际角速度分量,单位为rad/s。
"currentPosX": -1, // 当前机器人在map坐标系下的X坐标,此坐标可以直接用于设置动态插入点坐标
"currentPosY": -1, // 当前机器人在map坐标系下的Y坐标
"currentAngle": -1, // 当前机器人在map坐标系下的z轴转角(yaw)
"busyStatus": 0 //当busy为true时系统将仍然后接收新指令,但是不会立即处理。当系统退出busy状态后再处理消息
}
获取系统日志
URL: /system/log
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| log | string | 系统日志信息 |
获取机器人速度
URL: /system/speed
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| speed_x | float | x方向速度,单位为米每秒 |
| speed_y | float | y方向速度,单位为米每秒 |
| speed_angle | float | 转动角速度, 单位是弧度每秒 |
说明:
机器人本体坐标系方向为,机器人正前方为x方向,机器人左方为y方向,机器人上方为z方向。y方向的速度是全向轮如麦克纳姆轮才有的。对于一般差速底盘y方向速度一直为0
遥控机器人
URL: /system/speed
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| speed_x | float | x方向速度 |
| speed_y | float | y方向速度 |
| speed_angle | float | 转动角速度 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 遥控指令是否成功执行 |
说明: 调用此API后机器人会以指定的速度移动。移动的时间是不确定的,这个由驱动器决定,一般是几秒的时间。实际开发遥控功能时可以以5Hz左右的频率调用此API。 对于6.2.1之后版本的机器人,遥控也可以通过websocket实现,这样可以极大的提高响应速度,尤其对于使用跨网访问接口。通过websocket向/cmd_vel话题发送Twist消息即可。
关闭机器人
URL: /system/shutdown
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功接收关机指令 |
校正机器人陀螺仪
URL: /system/calibrate_imu
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否开始校准陀螺仪 |
开始校正摄像头角度位置参数
URL: /system/calibrate_camera/start
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| camera_id | int | 当没有此参数时为单摄像头标定,当为0时为前摄像头标定,当为1时为后摄像头标定 |
说明:执行启动校准方法后需要遥控机器人在环境中运动,使其路径形成一个闭环完成闭环优化。闭环优化完成后,继续移动一段距离,然后调用提交参数方法完成参数校准。
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | string | 是否开始校准陀螺仪 |
取消摄像头角度位置校正参数
URL: /system/calibrate_camera/cancel
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | string | 是否取消校准陀螺仪 |
获取摄像头角度位置校正状态
URL: /system/calibrate_camera/status
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 标定状态,可以是CALIBRATING或CALIBRATED。分别表示标定中和标定完成 |
| accuracy | float | 在标定完成时候会包含此参数,表明标定准确度,最大值为100 |
提交摄像头角度位置校正参数
URL: /system/calibrate_camera/complete
请求方式: GET
说明: 只有在处于CALIBRATED状态下才能够提交标定参数
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 标定参数是否提交成功 |
开始标定雷达参数
URL: /system/calibrate_laser/start
请求方式: GET
说明: 雷达校准需要在摄像头校准之后完成。开启后遥控机器人在具有明显边界的环境中移动。等待标定参数生成
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否开始校准雷达 |
提交雷达校正参数
URL: /system/calibrate_laser/complete
请求方式: GET
说明: 在雷达标定状态变为 CALIBRATED 之后,调用此API将生成的标定参数提交到系统内。
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否成功提交雷达校准参数 |
取消校准雷达参数
URL: /system/calibrate_laser/cancel
请求方式: GET
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否成功取消雷达校准 |
获取雷达校准状态
URL: /system/calibrate_laser/status
请求方式: GET
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 雷达校准状态,可能为CALIBRATING, CALIBRATED, FREE |
检查系统更新状态
URL: /system/update/check
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 检查更新程序是否成功执行 |
| need_update | bool | 是否需要更新 |
开始自动更新程序
URL: /system/update/start
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 系统更新程序是否成功启动 |
取消自动更新程序
URL: /system/update/cancel
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 取消系统更新是否成功 |
获取软件更新日志
URL: /system/update/log
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否成功获取更新日志 |
| log | string | 系统更新日志内容 |
| is_complete | bool | 系统更新是否已经完成 |
获取当前调度服务器
URL: /system/schedule_manager
请求方式: GET
请求参数: 无
返回参数: 所有schedule manager数据,其中第一个是当前的schedule manager
返回数据示例
[
{
"ip": "192.168.0.23",
"update_time": 1576115449217,
"version": "1.0.0",
"id": "9188d590-8508-47bd-a704-d34ddb803265",
"port": 24958
}
]
系统自检
URL: /system/self_test
请求方式: GET
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| motor_driver | bool | 底盘驱动状态是否正常 |
| camera | bool | 摄像头状态是否正常 |
| charge | bool | 自动充电模块是否正常 |
| lidar | bool | 雷达是否正常 |
| bluetooth | bool | 蓝牙是否工作正常 |
| battery | bool | 获取电池电压是否正常 |
获取当前io电平情况
注意io仍为电平输出,获取的是输出电平的状态,并不是输入信号
URL: /system/io
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 获取状态 |
| out1 | string | "-1"为未设置,"0"为低电平, "1"为高电平 |
| out2 | string | "-1"为未设置,"0"为低电平, "1"为高电平 |
| out3 | string | "-1"为未设置,"0"为低电平, "1"为高电平 |
控制当前io电平情况
URL: /system/io
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| level | string | 0 为低电平, 1为高电平 |
| port | string | 可以为1,2,3分别对应三个IO端口 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 获取状态 |
| status | string | 设置电平状态 |
获取IO扩展板电平
说明: IO扩展板有16路IO,其中8路输入8路输出
URL: /system/bw_io
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| in | object | 输入端口的电平情况 |
| out | object | 输出端口的电平情况 |
返回数据示例
{
"in": {
"0": 0,
"1": 0,
"2": 0,
"3": 0,
"4": 0,
"5": 0,
"6": 0,
"7": 0,
},
"out": {
"0": 0,
"1": 0,
"2": 0,
"3": 0,
"4": 0,
"5": 0,
"6": 0,
"7": 0,
}
}
控制IO扩展板电平
URL: /system/bw_io
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| level | int | 0 为低电平, 1为高电平 |
| port | int | 可以为0-7分别对应8个IO端口 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 设置电平状态 |
获取机器人当前配置参数
URL: /system/config
请求方式: GET
请求参数: 无
返回参数:
5.0 以前版本返回
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称 |
| maps | list | 地图对应默认路径配置 |
| navigation_speed | float | 最大导航速度 |
| max_control_speed | float | 最大遥控速度 |
| bar_distance_min | float | 避障距离 |
| k2 | float | PID控制参数k2 |
| kp | float | PID控制参数kp |
| ki | float | PID控制参数ki |
| kd | float | PID控制参数kd |
| look_ahead_dist | float | 预估距离 |
| theta_max | float | 最大角速度 |
| plan_width | float | 车体宽度 |
| path_change | float | 避障时是否绕开 |
| forward_width | float | 预估距离 |
| rot_width | float | 车体旋转宽度 |
| backtime | float | 最大后退距离 |
5.0 以后版本返回
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称 |
| maps | list | 地图对应默认路径配置 |
| auto_charge | bool | 是否开启低电量自动充电 |
| slam_type | string | 导航类型 "camera"为摄像头导航,"lidar"为雷达导航 |
| lf_linear_v | float | 最大导航速度 |
| lf_theta_max | float | 最大导航角速度 |
| lf_k2 | float | PID控制参数k2 |
| lf_kp | float | PID控制参数kp |
| lf_ki | float | PID控制参数ki |
| lf_kd | float | PID控制参数kd |
| lf_look_ahead_dist | float | 预估距离 |
| robot_radius | float | 机器人半径 |
| lf_xy_goal_tolerance | float | 位置允许误差 |
| lf_yaw_goal_tolerance | float | 角度允许误差 |
| astar_path_changeability | bool | 是否绕开 |
| lf_bar_distance_min | float | 避障距离 |
| lf_forward_max_dist | float | 避障最远检测距离 |
| lf_move_direction | int | 导航时机器人方向,0正向,1反向,2自动 |
| go_charge_percentage | float | 返回充电电量百分比,需要6.1.7及以上版本 |
| use_smooth_switch_map | float | 是否使用导航流畅切换,开启后机器人切换地图时会更加流畅,但是跨地图导航时机器人会消耗更多CPU |
6.6.8 增加参数
| 参数 | 类型 | 说明 |
|---|---|---|
| lagrange_id | string | 拉格朗日调度服务器ID |
| weixin_id | string | 微信消息发送目标 |
| wifi_ssid | string | wifi名称 |
| wifi_password | string | wifi密码, 当有此参数时机器人会自动连接对应WiFi,如果有多个同名WiFi机器人会自动选择其中信号较好的 |
修改机器人配置
URL: /system/config
请求方式: POST
请求参数:
5.0 版本之前参数
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称,可选参数 |
| maps | list | 地图对应默认路径配置,可选参数 |
| navigation_speed | float | 最大导航速度,可选参数 |
| max_control_speed | float | 最大遥控速度,可选参数 |
| bar_distance_min | float | 避障距离,可选参数 |
| k2 | float | PID控制参数k2,可选参数 |
| kp | float | PID控制参数kp,可选参数 |
| ki | float | PID控制参数ki,可选参数 |
| kd | float | PID控制参数kd,可选参数 |
| look_ahead_dist | float | 预估距离,可选参数 |
| theta_max | float | 最大角速度,可选参数 |
| plan_width | float | 车体宽度,可选参数 |
| path_change | float | 避障时是否绕开,可选参数 |
| forward_width | float | 预估距离,可选参数 |
| rot_width | float | 车体旋转宽度,可选参数 |
| backtime | float | 最大后退距离,可选参数 |
| deliver_wait_time | float | 送餐最长等待时间,可选参数 |
5.0版本之后参数
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称 |
| maps | list | 地图对应默认路径配置 |
| auto_charge | bool | 是否开启低电量自动充电 |
| slam_type | string | 导航类型 "camera"为摄像头导航,"lidar"为雷达导航 |
| lf_linear_v | float | 最大导航速度 |
| lf_theta_max | float | 最大导航角速度 |
| lf_k2 | float | PID控制参数k2 |
| lf_kp | float | PID控制参数kp |
| lf_ki | float | PID控制参数ki |
| lf_kd | float | PID控制参数kd |
| lf_look_ahead_dist | float | 预估距离 |
| robot_radius | float | 机器人半径 |
| lf_xy_goal_tolerance | float | 位置允许误差 |
| lf_yaw_goal_tolerance | float | 角度允许误差 |
| astar_path_changeability | bool | 是否绕开 |
| lf_bar_distance_min | float | 避障距离 |
| lf_forward_max_dist | float | 避障最远检测距离 |
| lf_move_direction | int | 导航时机器人方向,0正向,1反向,2自动 |
| go_charge_percentage | float | 返回充电电量百分比,需要6.1.7及以上版本 |
| use_smooth_switch_map | float | 是否使用导航流畅切换,开启后机器人切换地图时会更加流畅,但是跨地图导航时机器人会消耗更多CPU |
返回参数:
修改后的机器人参数
5.0 以前版本返回
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称 |
| maps | list | 地图对应默认路径配置 |
| navigation_speed | float | 最大导航速度 |
| max_control_speed | float | 最大遥控速度 |
| bar_distance_min | float | 避障距离 |
| k2 | float | PID控制参数k2 |
| kp | float | PID控制参数kp |
| ki | float | PID控制参数ki |
| kd | float | PID控制参数kd |
| look_ahead_dist | float | 预估距离 |
| theta_max | float | 最大角速度 |
| plan_width | float | 车体宽度 |
| path_change | float | 避障时是否绕开 |
| forward_width | float | 预估距离 |
| rot_width | float | 车体旋转宽度 |
| backtime | float | 最大后退距离 |
5.0 以后版本返回
| 参数 | 类型 | 说明 |
|---|---|---|
| default_map | string | 默认地图名称 |
| maps | list | 地图对应默认路径配置 |
| navigation_speed | float | 最大导航速度 |
| auto_charge | bool | 是否开启低电量自动充电 |
| slam_type | string | 导航类型 "camera"为摄像头导航,"lidar"为雷达导航 |
| lf_linear_v | float | 最大导航速度 |
| lf_theta_max | float | 最大导航角速度 |
| lf_k2 | float | PID控制参数k2 |
| lf_kp | float | PID控制参数kp |
| lf_ki | float | PID控制参数ki |
| lf_kd | float | PID控制参数kd |
| lf_look_ahead_dist | float | 预估距离 |
| robot_radius | float | 机器人半径 |
| lf_xy_goal_tolerance | float | 位置允许误差 |
| lf_yaw_goal_tolerance | float | 角度允许误差 |
| astar_path_changeability | bool | 是否绕开 |
| lf_bar_distance_min | float | 避障距离 |
| lf_forward_max_dist | float | 避障最远检测距离 |
| lf_move_direction | int | 导航时机器人方向,0正向,1反向,2自动 |
| go_charge_percentage | float | 返回充电电量百分比,需要6.1.7及以上版本 |
| use_smooth_switch_map | float | 是否使用导航流畅切换,开启后机器人切换地图时会更加流畅,但是跨地图导航时机器人会消耗更多CPU |
恢复机器人默认参数
URL: /system/config
请求方式: DELETE
请求参数
| 参数 | 类型 | 说明 |
|---|---|---|
| key | string | 对应参数的名称,如k2,kp,ki等等 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 恢复默认值操作状态 |
让机器人播放语音
URL: /system/tts
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| text | string | 需要机器人播放的语音对应的文本 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 语音播放状态 |
说明: 机器人语音文件在第一次播放时需要联网下载,所以机器人未联网情况下无法播放新语音。成功播放后语音文件会自动缓存在机器人中,之后播放不再需要网络连接。
机器人当前是否正在播放语音
URL: /system/tts/playing
请求方式: GET
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | bool | 语音播放状态 |
停止正在播放的语音
URL: /system/tts/stop
请求方式: GET
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否成功停止播放 |
机器人的语音播放记录
URL: /system/tts/records
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| package_name | string | 语音包名称,可选参数。当没有此参数时返回所有的语音记录 |
| text | string | 当有此参数时,返回对应文字对应的语音文件。当没有此参数时返回整个语音包文件 |
返回参数:
当没有package_name参数时返回的数据结构如下
| 参数 | 类型 | 说明 |
|---|---|---|
| packages | list | 语音包名称列表 |
| records | list | 语音播放记录 |
| current_package | string | 当前语音包名称 |
示例数据:
{
"packages": [
"\u6653\u6653",
"zh-cn",
"Jenny",
"SunHi",
"\u5c0f\u8587",
"xx"
],
"records": [
{
"text": "\u6b22\u8fce\u5149\u4e34",
"md5sum": "d5bd516c5a6827d585b1a4b08e352241",
"tags": [
"\u8fce\u5bbe\u6a21\u5f0f"
],
"codenames": [
"all"
],
"i18n": {
"en": "Welcome",
"ko": "\uc548\ub155\ud558\uc138\uc694",
"zh-cn": "\u6b22\u8fce\u5149\u4e34"
},
"mode": [
"all"
],
"last_active": 1663219852937,
"active_count": 81
},
{
"text": "\u5f00\u59cb\u5145\u7535",
"md5sum": "1572fba0bf9d48b8c086b5c83f10e319",
"tags": [
"\u5145\u7535"
],
"codenames": [
"all"
],
"i18n": {
"en": "Start charging",
"ko": "\ucda9\uc804 \uc2dc\uc791",
"zh-cn": "\u5f00\u59cb\u5145\u7535"
},
"mode": [
"all"
],
"last_active": 1663482021699,
"active_count": 421
},
...
],
"current_package": "\u6653\u6653"
}
上传语音包(语音音频文件方式)
URL: /system/tts/records
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| package_name | string | 语音包名称 |
说明: 注意整个请求不是以json格式调用。由于需要上传语音文件,数据要通过Form的形式上传。 语音包文件要添加到Form里面。成功上传后机器人会自动切换到当前的语音包。
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否上传成功 |
创建或替换语音包(语音压缩包方式)
URL: /system/tts/records
说明: 把之前导出的语音包文件导入机器人。注意由于需要上传文件此请求不是json格式。需要用Form方式上传。上传成功后机器人会自动切换到此语音包
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| package_name | string | 语音包名称 |
| package_file | file | 语音包文件 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否上传成功 |
替换语音文件
URL: /system/tts/records
说明: 替换机器人中特定文字对应的语音。由于需要上传语音文件所以此请求的方式不是json.数据需要通过添加到Form里面进行上传。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| package_name | string | 语音包名称 |
| text | string | 目标替换文字 |
| audio_file | string | 语音文件,可以为常见的音频文件格式 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否替换成功 |
删除语音包
URL: /system/tts/records
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| package_name | string | 语音包名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否删除成功 |
重置默认语音
URL: /system/tts/records
说明:把替换的语音重置为系统默认的语音。注意重置过程机器人需要联网下载语音。所以要保证机器人联网。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| text | string | 需要重置的文字 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否删除成功 |
获取语音修改文本
URL: /system/tts/alias
请求方式: GET
说明: 系统默认的语音可以替换成其他文字进行显示。注意替换并不会影响record记录。只是增加了一个alias记录。语音文本显示时可以判断是否有对应的alias记录,如果有则显示alias记录。
请求参数: 无
返回参数:
返回参数是一个dict,其中key是原文本,value是替换的文本
示例
{"\u4f60\u597d": "\u4f60\u597d\u554a"}
创建alias记录
URL: /system/tts/alias
请求方式: POST
说明: 这里上传的数据是所有的alias记录。上传后新数据会直接覆盖掉所有的老数据。
请求参数:
请求参数为一个dict,其中key是原文本,value是替换的文本
示例数据
{"\u4f60\u597d": "\u4f60\u597d\u554a"}
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 状态说明,默认ok |
替换文本内容和语音
URL: /system/tts/alias
请求方式: PUT
说明: 不同于上面全覆盖的方式,这个API只会修改发生变化的文本内容。同时生成新内容对应的语音文件,自动替换旧语音文件。
请求参数:
请求参数为一个dict,其中key是原文本,value是替换的文本
返回参数:
返回参数是一个dict,其中key是原文本,value是替换的文本
迎宾模式开关
URL: /system/greeting
请求方式: PUT
说明: 迎宾模式开启后,当有人走过机器人后机器人会说欢迎光临。你也可以通过语音相关的api替换成其他语句。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| greeting | bool | 是否开启迎宾模式 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| greeting | bool | 是否开启迎宾模式 |
获取对应话题数据
URL: /system/topic
请求方式: GET
说明: 获取对应话题的数据,自动转换成json格式进行返回。由于订阅话题需要一个时间,第一个调用可能会返回空数据。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| topic_name | string | 话题名称 |
返回参数:
话题对应的json数据。
获取语音模块IO电平
URL: /system/asr/io
请求方式: GET
说明: 语音模块共8个IO其中1-4是输出端口,5-8是输入端口。获取电平为获取输入端口电平。实际硬件端口序号从1开始,在程序中序号从0开始
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| 4 | bool | 是否为高电平 |
| 5 | bool | 是否为高电平 |
| 6 | bool | 是否为高电平 |
| 7 | bool | 是否为高电平 |
设置语音模块输出端口电平
URL: /system/asr/io
请求方式: PUT
说明: 语音模块共8个IO其中1-4是输出端口,5-8是输入端口。设置电平为设置输出端口电平。实际端口序号从1开始,在程序中序号从0开始。注意设置io有频率限制,过高的设置频率会导致部分设置被丢弃失效。最高设置频率100HZ
请求参数:
请求参数是一个dict,其中key是端口号,value是电平数据。
示例数据
{
"0": true,
"1": true,
"2": true,
"3": true,
}
返回数据:
{
"status": "ok"
}
设置语音模块输出端口PWM
URL: /system/asr/pwm
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| port | int | 设置的目标端口 |
| freq | int | pwm频率 |
| percent | int | pwm占空比 |
返回参数:
{
"status": "ok"
}
设置语音模块输出舵机信号
URL: /system/asr/servo
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| port | int | 输出端口号 |
| angle | int | 输出舵机角度 |
返回参数:
{
"status": "ok"
}
检查机器人证书
URL: /system/check_cert
请求方式: GET
请求参数: 无
返回值
{
"status": "ok"
}
让机器人连接wifi
URL: /system/wifi
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ssid | string | wifi的名称 |
| password | string | wifi密码 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 状态说明,默认ok |
注意: wifi最后是否连接成功是以机器人能否访问互联网判断的。如果你所要连接的wifi不能连接互联网则即使机器人成功连接了wifi,此时机器人仍然会返回连接错误。
是否使用预览版程序
URL: /system/use_dev
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| use_dev | bool | 是否使用预览版 |
设置使用预览版
URL: /system/use_dev
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| use_dev | bool | 是否使用预览版 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| use_dev | bool | 是否使用预览版 |
是否开启跟随功能
URL: /system/tracking_mode
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| tracking_flag | bool | 是否开启跟随功能 |
开启关闭跟随功能
URL: /system/tracking_mode
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enable | bool | 是否开启跟随功能 |
获取系统音量设置
URL: /system/volume
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| value | int | 音量百分比 |
设置系统音量
URL: /system/volume
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| value | int | 音量百分比 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
获取当前机器人是否连上互联网
URL: /system/is_online
请求方式: GET
请求参数:
无
返回参数
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否能连上互联网标志 |
获取已经保存的照片文件
URL: /system/saved_images/
说明: 获取已经保存的拍照图片文件。file_timestamp为文件的时间戳,拍照完成时会返回此参数。如果想要获取所有的图片列表可以不加file_timestamp访问此接口。
请求方式:GET
请求参数: 无
返回参数:
返回图片文件。
拍照
URL: /system/saved_images
说明: 拍照并保存图片文件。图片默认保存在/home/xiaoqiang/Pictures目录下,文件名为<时间戳>.png
请求方式:POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| topic | string | 可选参数,拍照的ROS话题,默认为/camera_node/image_raw,前摄像头话题为/multi/front/image_raw,后摄像头话题为/multi/back/image_raw |
| filename | string | 可选参数,保存的文件名,默认为时间戳 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| image | string | 图片的时间戳,可以用此时间戳获取到文件内容 |
删除拍照文件
URL: /system/saved_images/
请求方式: DELETE
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
获取已经保存的录像文件
URL: /system/saved_videos/
说明: 获取已经保存的录像文件。file_timestamp为文件的时间戳,录像完成时会返回此参数。录像文件默认保存在/home/xiaoqiang/Videos目录下,文件名为<时间戳>.mkv。如果想要获取所有的录像列表可以不加file_timestamp访问此接口。
请求方式:GET
请求参数: 无
返回参数:
返回录像文件。
开始录像
URL: /system/saved_videos
说明: 开始录像并保存视频文件。
请求方式:POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| topic | string | 可选参数,录像的ROS话题,默认为/camera_node/image_raw,前摄像头话题为/multi/front/image_raw,后摄像头话题为/multi/back/image_raw |
| duration | int | 可选参数,录像时长,单位为秒,默认为10秒 |
| filename | string | 可选参数,保存的文件名,默认为时间戳 |
返回参数:
此API会自动创建一个包含录像动作的任务。返回参数为任务对象。
当通过任务控制API停止此任务时,录像会停止并保存文件。
删除录像文件
URL: /system/saved_videos/
请求方式: DELETE
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
滑台控制相关API
获取滑台当前位置
URL: /system/slide_pose
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| zero_status | int | 是否已经归零, 0 没完成, 1 已经完成, -1 有错误 |
| current_pose | float | 当前位置,相对零点,zereo_status为1时才有效,单位米 |
| pose_ratio | float | 当前位置比例,相对零点,zereo_status为1时才有效, 0-1取值 |
移动滑台
URL: /system/slide_move_to
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| pose | float | 滑台高度百分比 |
| speed | float | 滑台速度单位米/秒,0表示使用默认速度 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| task | object | 滑台移动任务对象,滑台移动API内部会构造一个滑台移动任务 |
返回数据示例:
{
"id": "bff2bfb0-b2eb-42b8-9324-d86920faed83",
"name": "slide_task",
"loop_flag": false,
"current_task": {
"id": "9fe85f29-52f6-4783-b313-e812149f53aa",
"type": "slide_action",
"mode": 3,
"pose": 0.5,
"speed": 0,
"time": 0,
"progress": 0
},
"state": "WORKING",
"sub_tasks": [
{
"id": "9fe85f29-52f6-4783-b313-e812149f53aa",
"type": "slide_action",
"mode": 3,
"pose": 0.5,
"speed": 0,
"time": 0,
"progress": 0
}
],
"progress": 0.0,
"loop_count": 0
}
顶升机构控制API
获取当前顶升位置
URL: /system/jacking_pose
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| zero_status | int | 是否已经归零, 0 没完成, 1 已经完成, -1 有错误 |
| current_pose | float | 当前位置,相对零点,zereo_status为1时才有效,单位米 |
| pose_ratio | float | 当前位置比例,相对零点,zereo_status为1时才有效, 0-1取值 |
设置顶升位置
URL: /system/jacking_move_to
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| pose | float | 顶升高度百分比 |
| speed | float | 顶升速度单位米/秒,0表示使用默认速度,可选参数 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| task | object | 顶升移动任务对象,顶升移动API内部会构造一个顶升任务 |
返回数据示例:
{
"id": "bff2bfb0-b2eb-42b8-9324-d86920faed83",
"name": "jacking_task",
"loop_flag": false,
"current_task": {
"id": "9fe85f29-52f6-4783-b313-e812149f53aa",
"type": "jacking_action",
"mode": 3,
"pose": 0.5,
"speed": 0,
"time": 0,
"progress": 0
},
"state": "WORKING",
"sub_tasks": [
{
"id": "9fe85f29-52f6-4783-b313-e812149f53aa",
"type": "jacking_action",
"mode": 3,
"pose": 0.5,
"speed": 0,
"time": 0,
"progress": 0
}
],
"progress": 0.0,
"loop_count": 0
}
获取顶升角度
URL: /system/jacking_angle
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| frame_id | string | 坐标系ID,可选参数,不传就是机器人坐标系 可以是base_link, map |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| zero_status | int | 是否已经归零, 0 没完成, 1 已经完成, -1 有错误 |
| current_angle | float | 当前角度,单位弧度 |
设置顶升角度
URL: /system/jacking_angle_move_to
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| angle | float | 顶升角度,单位弧度 |
| speed | float | 顶升速度单位弧度/秒,0表示使用默认速度, 可选参数 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| task | object | 顶升角度任务对象,顶升角度API内部会构造一个顶升任务 |
获取UWB跟随状态
URL: /system/uwb_track
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enable | bool | 是否启用UWB跟随功能 |
启用UWB跟随功能
URL: /system/uwb_track
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enable | bool | 是否启用UWB跟随功能 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
获取ROS参数服务器参数
URL: /system/ros_params
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| param | string | 参数名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| 请求参数名称 | object | 参数值 |
设置ROS参数服务器参数
URL: /system/ros_params
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| param | string | 参数名称 |
| value | object | 参数值 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| 请求参数名称 | object | 参数值 |
重启路由器
URL: /system/restart_router
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| type | string | 路由器类型,可选参数 oray蒲公英路由器,tplink,huawei,tcl |
| ip | string | 路由器IP地址 |
| username | string | 路由器用户名 |
| password | string | 路由器密码 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
重启机器人
URL: /system/restart_robot
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | true |
重启novnc服务
URL: /system/restart_novnc
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | true |
onvif 监控摄像头相关API
获取局域网内所有摄像头信息
URL: /system/onvif_cameras
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| cameras | list | 局域网内的摄像头ip和端口 |
返回数据例子
[
{
"ip": "192.168.0.13",
"port": 9999
}
]
获取特定摄像头参数
URL: /system/onvif_cameras
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址 |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| profile | string | 摄像头的profile信息,由于profile有无法序列化的内容,所以这个返回内容是text |
示例返回数据:
[{
'Name': 'Stream_101',
'VideoSourceConfiguration': {
'Name': 'VideoSourceConfig_1',
'UseCount': 2,
'SourceToken': 'VideoSource_1',
'Bounds': {
'x': 0,
'y': 0,
'width': 2688,
'height': 1520
},
'_value_1': None,
'Extension': None,
'token': 'VideoSourceToken_1',
'_attr_1': {
}
},
'AudioSourceConfiguration': {
'Name': 'AudioSourceConfig_1',
'UseCount': 4,
'SourceToken': 'AudioSourceChannel_1',
'_value_1': None,
'token': 'AudioSourceConfigToken_1',
'_attr_1': {
}
},
'VideoEncoderConfiguration': {
'Name': 'VideoEncoder_101',
'UseCount': 1,
'Encoding': 'H264',
'Resolution': {
'Width': 2688,
'Height': 1520
},
'Quality': 3.0,
'RateControl': {
'FrameRateLimit': 25,
'EncodingInterval': 1,
'BitrateLimit': 6144
},
'MPEG4': None,
'H264': {
'GovLength': 50,
'H264Profile': 'High'
},
'Multicast': {
'Address': {
'Type': 'IPv4',
'IPv4Address': '239.0.0.1',
'IPv6Address': None
},
'Port': 8860,
'TTL': 128,
'AutoStart': False,
'_value_1': None,
'_attr_1': None
},
'SessionTimeout': datetime.timedelta(seconds=5),
'_value_1': None,
'token': 'VideoEncoderToken_101',
'_attr_1': {
}
},
'AudioEncoderConfiguration': {
'Name': 'AudioEncoderConfig_1',
'UseCount': 4,
'Encoding': 'G711',
'Bitrate': 64,
'SampleRate': 8,
'Multicast': {
'Address': {
'Type': 'IPv4',
'IPv4Address': '239.0.0.1',
'IPv6Address': None
},
'Port': 8862,
'TTL': 128,
'AutoStart': False,
'_value_1': None,
'_attr_1': None
},
'SessionTimeout': datetime.timedelta(seconds=5),
'_value_1': None,
'token': 'MainAudioEncoderToken_1',
'_attr_1': {
}
......
获取特定摄像头视频流
URL: /system/onvif_camera/stream
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| channel | int | 摄像头图像通道,可选参数,没有就默认为1通道 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| stream | string | 摄像头视频流地址 |
返回数据示例:
{
"stream": "rtsp://admin:SctecCam01@192.168.0.247:554/Streaming/Channels/101?transportmode=unicast&profile=Profile_101"
}
绝对位置移动监控摄像头
URL: /system/onvif_camera/move
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| x | float | 摄像头横向转动角度 |
| y | float | 摄像头纵向转动角度 |
| zoom | float | 摄像头缩放比例 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok,执行状态 |
| description | string | 状态描述 |
监控摄像头移动到预置点
URL: /system/onvif_camera/goto_preset
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| preset | string | 摄像头预置点名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok,执行状态 |
速度模式移动监控摄像头
URL: /system/onvif_camera/move_speed
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| speed_x | float | 摄像头横向转动速度 |
| speed_y | float | 摄像头纵向转动速度 |
| speed_zoom | float | 摄像头缩放速度 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | success,执行状态 |
| description | string | 状态描述 |
监控摄像头拍照
URL: /system/onvif_camera/snapshot
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| channel | int | 摄像头通道,可选参数,默认为1 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| snapshot | string | 拍照生成的照片位置, 可以通过文件API访问 |
获取监控摄像头温度
说明: 需摄像头支持红外测温并且支持海康的ISAPI协议。如果没有插入用户测温点则此API返回所有返回内的温度信息。如果添加了用户测温点则返回用户测温点的温度信息。
URL: /system/onvif_camera/temperature
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| temperature | object | 摄像头温度信息 |
返回参数示例:
{
"temperature": {
"ThermometryRulesTemperatureInfoList": {
"ThermometryRulesTemperatureInfo": [
{
"id": 1,
"maxTemperature": 24.9,
"minTemperature": 24.0,
"averageTemperature": 24.5,
"MaxTemperaturePoint": {
"positionX": 0.308,
"positionY": 0.889
},
"MinTemperaturePoint": {
"positionX": 0.154,
"positionY": 0.93
},
"isFreezedata": false
},
{
"id": 2,
"maxTemperature": 24.0,
"minTemperature": 24.0,
"averageTemperature": 24.0,
"MaxTemperaturePoint": {
"positionX": 0.851,
"positionY": 0.321
},
"MinTemperaturePoint": {
"positionX": 0.851,
"positionY": 0.321
},
"isFreezedata": false
}
]
}
}
}
获取监控摄像头当前位姿
URL: /system/onvif_camera/pose
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 摄像头水平角度量 |
| y | float | 摄像头垂直角度量 |
| zoom | float | 摄像头缩放比例 |
屏幕人脸跟随设置(只有特定机型有此功能)
URL: system/head_camera_follow
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| control_flag | bool | 确定是否开启或关闭头部跟踪 |
| target_name | string | 目标名称, 比如"person" |
| target_width | float | 目标在图像中的宽度位置,取值范围0到1,比如0.5表示在图像中心 |
| target_height | float | 目标在图像中的高度位置,取值范围0到1,比如0.5表示在图像中心 |
| control_speed | float | 控制速度,取值范围0到2*pi,单位为弧度/秒 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok,执行状态 |
通过摄像头判断电梯门是否有打开
URL: /system/elevator_door
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| direction | string | 电梯门方向,"front"表示前门,"back"表示后门 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| open | bool | 电梯门是否打开 |
文件系统操作API
注意为了系统安全,目前只开放了四个可操作的文件夹,分别是:
- /home/xiaoqiang/saved-slamdb
- /home/xiaoqiang/Videos
- /home/xiaoqiang/Pictures
- /home/xiaoqiang/slamdb
获取文件
URL: /fs/file_api
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件路径 |
返回参数:
文件内容
创建文件
URL: /fs/file_api
请求方式: POST
说明: 注意path的参数放在GET里面,文件通过Form表单上传。文件参数名为file.
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
文件或文件夹重命名
URL: /fs/file_api
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 原始文件路径 |
| new_name | string | 新文件路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
删除文件
URL: /fs/file_api
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
获取文件夹内容
URL: /fs/dir_api
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件夹路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| files | list | 文件列表,以创建时间排序 |
| directories | list | 文件夹列表,以创建时间排序 |
创建文件夹
URL: /fs/dir_api
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件夹路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
删除文件夹
URL: /fs/dir_api
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件夹路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
获取文件或文件夹详细信息
URL: /fs/get_file_info
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| path | string | 文件或文件夹路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| mode | int | 文件或文件夹权限 |
| size | int | 文件大小 |
| atime | int | 最后访问时间 |
| mtime | int | 最后修改时间 |
| ctime | int | 最后创建时间 |
| mimetype | string | 文件类型 |
复制文件或文件夹
URL: /fs/copy
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| from | string | 文件或文件夹路径 |
| to | string | 目标路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
批量删除文件或文件夹
URL: /fs/delete
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| delete | list | 文件或文件夹路径列表 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
剪切文件或文件夹
URL: /fs/cut
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| from | string | 文件或文件夹路径 |
| to | string | 目标路径 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
创建地图API
启动创建地图
URL: /map/start
请求方式: GET
说明: 接受到启动命令后系统会处于Busy状态,线程启动成功后系统进入Mapping状态。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| camera_id | int | 可选参数,当没有此参数时为单摄像头建图,为0时为前摄像头建图,为1时为后摄像头建图 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功启动导航 |
结束创建地图线程
URL: /map/stop
请求方式: GET
说明: 接收到结束命令进入Busy状态。后先自动保存地图,然后开始关闭建图线程,线程关闭后系统进入Free状态。
请求参数: 无
返回参数
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功结束建图 |
更新地图
URL: /map/update
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map | string | 可选参数,需要更新的地图,当没有此参数时则更新上次导航使用的地图 |
| path | string | 可选参数,配合start_index使用设置机器人初始位置,对于雷达导航是必须的 |
| start_index | int | 可选参数,设置机器人的初始位置,对于雷达导航是必须的 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功开启更新地图 |
当前机器人位置
URL: /map/pose
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 机器人当前x坐标,单位为米 |
| y | float | 机器人当前y坐标,单位为米 |
| angle | float | 机器人当前朝向角度, 单位为度 |
获取当前正在创建的地图信息
URL: /map/current_map_image
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 是否成功获取地图信息 |
| map_params | object | 地图的meta信息 |
| map_image | string | 获取当前地图图片的URL路径 |
返回数据示例:
{
"status": "OK",
"map_params": {
"origin": [
-7.621091365814209,
-9.969059944152832,
0.0
],
"width": 306,
"resolution": 0.05000000074505806,
"height": 324
},
"map_image": "/api/v1/map/current_map_png"
}
说明:机器人图片像素坐标和实际坐标的转换关系为标准的ROS地图关系。像素坐标的原点为图片左上角,x正方向向右,y正方向向下。地图坐标原点为左下角,x正方向向右,y正方向向上。转换关系如下
x_map = x_origin + x_pixel * res
y_map = y_origin + h_map * res - y_pixel * res
其中 x_map, y_map为像素点对应的地图坐标
x_origin, y_origial 为左下角原点坐标
x_pixel, y_pixel 为像素坐标
h_map为地图像素高度,可以从地图图片文件去获取
保存当前创建的地图
URL: /map/current_map_image
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 创建的地图名称 |
| type | string | 地图类型,可选参数。当为floor时代表此地图为普通楼层地图,当为elevator时代表此地图为电梯地图,默认为floor |
| levels | int[] | 地图楼层,可选参数,此地图所代表的楼层。不同楼层可以共用一个地图,默认为1 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 地图保存是否成功 |
| name | string | 保存后的地图名称 |
获取当前创建地图的png图片
URL: /map/current_map_png
请求方式: GET
请求参数: 无
返回参数: 当前正在创建的地图的png图片
获取创建地图时机器人的运动轨迹
URL: /map/track
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| trajectory | list | 创建地图时机器人运动轨迹, 只有在保存地图后才能获取数据 |
返回数据示例:
{
"trajectory": [
{
"y": 0.3912552,
"x": 0.3480716,
"z": -0.0384934
},
{
"y": 0.3972594,
"x": 0.4466029,
"z": -0.038688
},
{
"y": 0.403202,
"x": 0.5998781,
"z": -0.0389315
},
...
]
}
获取机器人轨迹
URL: /map/track
请求方式: GET
说明: 获取机器人轨迹只能在地图保存之后才行。
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| trajectory | list | 返回数据为一个列表。每个元素为包含x y z 属性的dict |
示例数据
{
"trajectory": [
{
"x": -0.000295,
"y": 0.0008704,
"z": 1e-07
},
{
"x": 0.000326,
"y": 0.000888,
"z": -9.69e-05
},
]
}
导航部分
启动导航状态
URL: /navigation/start
请求方式: GET
说明: 接收到启动命令后系统会处于Busy状态,线程启动成功后系统进入Navigating状态。启动命令参数中包含导航地图文件名字。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map | string | 导航所使用的地图名称,当没有此参数时机器人采用上次启动导航时的地图 |
| path | string | 导航所使用的路径名称,当没有此参数时机器人采用上次启动导航的路径 |
| start_index | int | 机器人初始位置,有此参数时机器人会采用对应目标点位置作为初始位置。如start_index为1时机器人采用1号导航点位置作为初始位置。 当没有此参数时机器人将采用上次启动导航时设置的start_index。对于视觉导航此参数不是必须的。对于雷达导航此参数是必须的。当设置为-1时将采用充电桩位置作为初始位置。当摄像头导航且没有此参数时采用自动定位模式 |
| level | int | 可选参数,当前机器人所在楼层。如果没有此参数默认为1 |
返回参数
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功启动导航 |
| description | string | 若启动失败,其原因说明 |
导航时开启或关闭更新地图
URL: /navigation/update_map
请求方式: PUT
说明: 在导航状态下开启或关闭更新地图。在这种情况下可以在导航移动的过程中更新地图
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enabled | bool | 是否开启更新地图,true为开启,false为关闭 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enabled | bool | 是否开启更新地图 |
获取是否在导航时更新地图
URL: /navigation/update_map
请求方式: GET
说明: 获取是否在导航时更新地图
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| enabled | bool | 是否开启更新地图 |
启动调度导航
URL: /navigation/start_schedule_mode
请求方式: GET
说明: 接收到启动命令后系统会处于Busy状态,线程启动成功后系统进入Navigating状态。此导航状态不同于普通导航状态。伽利略导航功能将不能使用,机器人将由拉格朗日调度系统控制。
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功启动调度导航 |
| description | string | 若启动失败,其原因说明 |
停止导航
URL: /navigation/stop
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功启动调度导航 |
| description | string | 若启动失败,其原因说明 |
停止调度导航
URL: /navigation/stop_schedule_mode
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 是否成功启动调度导航 |
| description | string | 若启动失败,其原因说明 |
机器人当前位置信息
URL: /navigation/pose
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 机器人x坐标,单位为米 |
| y | float | 机器人y坐标,单位为米 |
| angle | float | 机器人朝向角度,单位为度 |
获取当前导航正在使用的地图和路径名称
URL: /navigation/current_path
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map | string | 当前导航使用的地图名称 |
| path | string | 当前导航使用的路径名称 |
获取当前位置到目标点的距离
URL: /navigation/target_distance
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| distance | float | 当前位置到目标点的距离 |
获取已经保存的详细地图信息
URL: /navigation/saved_maps
请求参数: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 目标地图的名称,可选参数。当没有此参数时返回所有已保存的地图信息。当有此参数时,返回目标地图的信息 |
| type | string | 地图类型,可选参数。为lidar时返回雷达地图,为camera时返回摄像头地图,为all时返回所有类型地图 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| resolution | float | 地图分辨率,即每像素点对应的实际距离 |
| origin | object | 地图原点坐标 |
| occupied_thresh | float | 占用阈值,一般没什么用 |
| free_thresh | float | 未占用阈值,一般没什么用 |
| negate | int | 是否反转占用和未占用,一般没什么用 |
| name | string | 目标地图名称 |
| md5sum | string | 目标地图数据的md5sum值,用于判断地图是否是一样的 |
| map_type | string | 地图类型,值为floor时表示为楼层地图,为elevator时表示为电梯地图 |
| levels | int[] | 地图代表的楼层 |
| slam_type | string | 地图建图类型,lidar表示为雷达地图,camera表示为摄像头地图 |
获取保存的地图中的机器人运动轨迹
URL: /navigation/robot_tracks
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标路径的地图名称。可选参数,没有此参数时返回所有地图中的机器人路径数据。当有此参数时只返回目标地图的机器人路径数据 |
返回参数:
当请求参数有map_name时
| 参数 | 类型 | 说明 |
|---|---|---|
| trajectory | list | 机器人运动轨迹点列表 |
当请求参数有map_name时
返回所有地图的轨迹点列表,包含地图名称和轨迹点数据
返回数据示例:
当没有map_name参数时
[
{
"map_name": "map1",
"track": [
{
"y": 0.0000016,
"x": -0.0010667,
"z": -0.0000129
},
{
"y": 0.0084065,
"x": 0.0657083,
"z": -0.0001012
},
{
"y": -0.0036619,
"x": 0.1893717,
"z": -0.0003028
},
...
]
}
]
获取目标地图的PGM图片信息
URL: /navigation/map_pgm
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 目标地图名称 |
返回目标地图的pgm图片数据
获取目标地图的png图片信息
URL: /navigation/map_png
请求方式: GET
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 目标地图名称 |
返回目标地图的png图片数据
获取当前正在使用的地图
URL: /navigation/current_map
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 目标地图名称 |
| md5sum | string | 目标地图数据的md5sum值 |
上传当前机器人地图数据至调度服务器
URL: /navigation/upload_map
请求方式: GET
说明: 此方法是异步方法,调用后会在系统中创建一个上传地图数据的线程。上传进度可以通过task相关api获取。使用前一定要保证调度服务器和机器人可以正常通信,且机器人处于被激活状态。
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| server_id | string | 调度服务器id |
返回参数:
地图上传任务数据
示例返回数据:
{
"name": "upload_map",
"loop_flag": false,
"id": "8bc1e6dd-df1f-4a78-a17b-c60911ce5a06",
"state": "WORKING",
"sub_tasks": [
{
"server_id": "9188d590-8508-47bd-a704-d34ddb803265",
"state": "WORKING",
"result": "",
"progress": 0,
"type": "upload_map_action",
"id": "e21c743d-c692-4ed2-b2be-1470da60ba1e"
}
],
"progress": 0.0,
"current_task": {
"server_id": "9188d590-8508-47bd-a704-d34ddb803265",
"state": "WORKING",
"result": "",
"progress": 0,
"type": "upload_map_action",
"id": "e21c743d-c692-4ed2-b2be-1470da60ba1e"
}
}
从调度服务器下载地图
URL: /navigation/download_map
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| server_id | string | 调度服务器id |
| map_id | string | 需要下载的地图id |
返回参数:
地图下载任务数据
返回数据示例:
{
"name": "download_map",
"loop_flag": false,
"id": "fb7669d2-5f03-4461-a992-95422f66d49d",
"state": "WORKING",
"sub_tasks": [
{
"server_id": "9188d590-8508-47bd-a704-d34ddb803265",
"map_id": "04f777b8-ff9d-4303-87ac-334dab2e0ffe",
"state": "WORKING",
"result": "",
"progress": 0,
"type": "download_map_action",
"id": "2fb7eebc-8048-47d8-b62a-60365c772f87"
}
],
"progress": 0.0,
"current_task": {
"server_id": "9188d590-8508-47bd-a704-d34ddb803265",
"map_id": "04f777b8-ff9d-4303-87ac-334dab2e0ffe",
"state": "WORKING",
"result": "",
"progress": 0,
"type": "download_map_action",
"id": "2fb7eebc-8048-47d8-b62a-60365c772f87"
}
}
下载机器人地图
URL: /navigation/download_map_from_robot
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 需要下载的地图名称 |
返回数据: 地图文件压缩包
上传地图至机器人
URL: /navigation/upload_map_to_robot
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 上传地图名称 |
| map_files | 文件 | 下载地图API所产生的地图文件压缩包 |
注意: 此方法的上传数据不是json格式,是MultipartFormData格式
返回
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 完成状态,默认ok |
开启导航任务
URL: /navigation/start_nav_task
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 导航目标点坐标x值,单位为米 |
| y | float | 导航目标点坐标y值,单位为米 |
| theta | float | 导航目标点角度值,单位为弧度 |
| map | string | 可选参数,目标点所在的地图 |
| path | string | 可选参数,目标点所在的路径 |
说明:
当没有map和path参数时,机器人在当前地图中移动至对应坐标。如果包含map和path参数,机器人将自动寻找地图的连接点,并在移动过程中自动切换地图,最终到达目标地图中的目标点。此功能可以用来跨地图导航,比如,在不同的楼层间,不同的区域中进行导航。
返回参数:
导航任务数据
示例返回数据:
{
"name": "navigation task",
"loop_flag": false,
"id": "a6858132-5e84-4d37-b968-19808dd8fd96",
"state": "WORKING",
"sub_tasks": [
{
"state": "WAITTING",
"result": "",
"progress": 0,
"theta": 1.0936689376831055,
"y": -0.1287004053592682,
"x": -0.28466343879699707,
"current_location": {
"y": -1,
"x": -1,
"theta": -1
},
"type": "nav_action",
"id": "99bfb264-8f8f-4950-940b-6f6b883e7358"
}
],
"progress": 0,
"current_task": {
"state": "WAITTING",
"result": "",
"progress": 0,
"theta": 1.0936689376831055,
"y": -0.1287004053592682,
"x": -0.28466343879699707,
"current_location": {
"y": -1,
"x": -1,
"theta": -1
},
"type": "nav_action",
"id": "99bfb264-8f8f-4950-940b-6f6b883e7358"
}
}
开始自动充电
URL: /navigation/go_charge
请求方式: GET
请求参数: 无
返回参数:
返回充电任务对象
停止自动充电
URL: /navigation/stop_charge
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 停止充电操作状态 |
| task | object | 充电任务对象 |
移动到对应目标点
URL: /navigation/move_to_index
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| index | int | 目标点index,即绘制路径时插入导航点的index |
| map | string | 目标位置所在地图,可选参数 |
| path | string | 目标位置所在的路径 |
| level | int | 可选参数,当有此参数时会自动通过电梯移动到目标位置 |
说明: 当没有map和path参数时,机器人会在当前地图上移动到目标位置。如果包含map和path参数,机器人将自动寻找地图的连接点,并在移动过程中自动切换地图,最终到达目标地图中的目标点。此功能可以用来跨地图导航,比如,在不同的楼层间,不同的区域中进行导航。
返回参数:
返回导航任务对象
取消当前导航任务
URL: /navigation/stop_nav_task
请求方式: GET
请求参数: 无
返回参数:
返回当前导航任务对象
获取导航循环任务信息
导航循环任务为沿着插入的导航点依次移动的导航任务,其效果和点击客户端上的循环选项一样。
URL: /navigation/loop_task
请求方式: GET
请求参数: 无
返回参数:
返回循环导航任务状态
开始导航循环任务
URL: /navigation/loop_task
请求方式: POST
请求参数
| 参数 | 类型 | 说明 |
|---|---|---|
| wait_time | int | 循环到达目标点后的等待时间 |
返回参数:
返回新创建的导航循环任务,如果已有导航循环任务则会返回错误
停止导航循环任务
URL: /navigation/loop_task
请求方式: DELETE
请求参数: 无
返回参数:
返回当前的导航循环任务
获取充电桩位置
URL: /navigation/charge_pose
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 充电桩位置坐标x |
| y | float | 充电桩位置坐标y |
| theta | float | 充电桩角度theta |
保存充电桩位置
URL: /navigation/charge_pose
请求方式: POST
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 充电桩位置坐标x |
| y | float | 充电桩位置坐标y |
| theta | float | 充电桩角度theta |
动态切换地图
URL: /navigation/reload
method: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map | string | 想要切换的地图名称 |
| path | string | 切换的路径名称,可选参数,当没有此参数时,路径使用机器人设置里面的默认路径 |
说明:
此方法为动态切换地图,导航程序不会重启。所以切换速度会很快。推荐在机器人需要切换场景时使用,比如上下电梯后不同楼层地图的切换。
返回参数:
{
"status": "ok",
"map": "",
"path": ""
}
获取导航路径点
URL: /navigation/path
请求方式: GET
请求参数
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 可选参数,获取的目标地图名称 |
| path_name | string | 可选参数,获取的目标路径名称 |
说明:
当同时有map_name和path_name参数的时候,返回数据为对应路径文件的内容。如下
{
"map_name": "map1",
"path_name": "path1",
"path_data": "0.575 -0.356 0\n6.98246 17.95874 0\n9.969936 15.64437 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-3.247468 4.031781 0\n-2.099531 2.193034 0\n6.98246 17.95874 0\n6.98246 17.95874 0\n0.575 -0.356 0\n9.969936 15.64437 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-2.099531 2.193034 0\n-3.247468 4.031781 0\n-2.099531 2.193034 0\n-1.278543 -2.399499 0\n-3.247468 4.031781 0\n-2.099531 2.193034 0\n12.3693 12.11829 0\n9.969936 15.64437 0\n-1.928585 1.842135 0\n-1.278543 -2.399499 0\n-3.247468 4.031781 0\n-2.099531 2.193034 0\n12.3693 12.11829 0\n9.969936 15.64437 0\n-1.928585 1.842135 0\n-1.278543 -2.399499 0\n-6.600385 -5.06042 0\n-6.555664 -5.038059 0\n-6.510942 -5.015699 0\n-6.466221 -4.993338 0\n-6.4215 -4.970977 0\n-6.376779 -4.948617 0\n-6.332057 -4.926256 0\n-6.287336 -4.903895 0\n-6.242614 -4.881535 0\n-6.197893 -4.859174 0\n-6.153172 -4.836813 0\n-6.10845 -4.814453 0\n"
}
当只有map_name参数时,返回的数据是对应地图的所有路径名称,如下
[
"pathY01",
"path4"
]
当没有map_name和path_name参数时,返回的数据为所有地图和其对应的路径名称
{
"14": [
"pathY01",
"path\u673a\u573a\u5230\u8fbe\u53e31\u6b63",
"path\u673a\u573a3",
"path\u673a\u573a\u5230\u8fbe\u53e31\u53cd",
"path\u673a\u573a2"
],
"\u58f9\u667a\u4e91\u516c\u53f8": [
"01"
],
"12": [
"pathY01",
"path\u673a\u573a\u5230\u8fbe\u53e31\u6b63",
"path\u673a\u573a3",
"path\u673a\u573a\u5230\u8fbe\u53e31\u53cd",
"path\u673a\u573a2"
],
"13": [
"pathY01",
"path\u673a\u573a\u5230\u8fbe\u53e31\u6b63",
"path\u673a\u573a3",
"path\u673a\u573a\u5230\u8fbe\u53e31\u53cd",
"path\u673a\u573a2"
],
"map5": [
"pathY01",
"path4"
]
}
上传导航路径点
URL: /navigation/path
请求方式: POST, PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
| path_data | string | 路径文件内容 |
说明:
路径文件内容格式为每个路径点的坐标 x y z,z一般为0,然后换行。可以参照上面API的返回值。如果对应路径已经存在则覆盖之前的路径。
返回参数:
和请求参数一致
删除导航路径点
URL: /navigation/path
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
说明:
注意删除路径的时候会自动删除此路径对应的导航点
返回值:
{
"status": "ok"
}
获取导航目标点
URL: /navigation/nav_points
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标地图名称 |
| path_name | string | 目标路径名称 |
说明:
返回的path_data是导航点文件内容,其格式为 x y z theta errorX errorY direction name。其中x y z为导航点坐标,一般z为0。theta为导航点角度。errorX errorY为导航点所允许的误差。direction为循环方向,name为点的名称,可以为空。和客户端中的设置一致。
当没有传入map_name和path_name参数时,系统会自动选取上次导航的地图和路径,并返回上次导航的导航点数据。
返回参数
{
"map_name": "map5",
"path_name": "path4",
"path_data": "0.575 -0.356 0 -1.117307 0.1 0.1 0\n6.98246 17.95874 0 -2.563412 0.1 0.1 0\n9.969936 15.64437 0 2.045675 0.1 0.1 0\n-2.099531 2.193034 0 -1.078226 0.1 0.1 0\n-2.099531 2.193034 0 -1.078226 0.1 0.1 0\n-2.099531 2.193034 0 -1.078226 0.1 0.1 0\n-2.099531 2.193034 0 -1.078226 0.1 0.1 0\n-3.247468 4.031781 0 -0.9649882 0.1 0.1 0\n-2.099531 2.193034 0 -1.078226 0.1 0.1 0\n6.98246 17.95874 0 -2.563412 0.1 0.1 0\n6.98246 17.95874 0 -2.563412 0.1 0.1 0\n"
}
上传导航目标点
URL: /navigation/nav_points
请求方式: POST, PUT
参数说明
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标地图的名称 |
| path_name | string | 目标路径的名称 |
| path_data | string | 导航目标点文件内容 |
说明:当map_name或path_name没有传入时,将采用当前正常使用的地图和路径最为修改对象。
返回参数:
和请求参数一致
删除导航目标点
URL: /navigation/nav_points
请求方式: DELETE
参数说明
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标地图名称 |
| path_name | string | 目标路径名称 |
说明:
删除导航点的时候并不会自动删除路径文件
返回值
{
"status": "ok"
}
获取地图连接点
URL: /navigation/point_connections
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| points | list | 当前所有地图中的所有导航点 |
| connections | list | 导航点之间的连接关系 |
示例数据
{
"points": [
{
"x": 1.624922, // 导航点 x 坐标
"y": -0.372011, // 导航点 y 坐标
"theta": 0.0, // 导航点角度
"name": "", // 导航点名称
"map": "office", // 导航点所在地图名称
"path": "path2", // 导航点所在地图路径
"index": 0, // 导航点序号
"type": "floor", // 导航点所属地图类型
"levels": [ // 导航点所属楼层,可以为多层。和地图楼层一致
1
]
},
{
"x": 0.8710775,
"y": -0.09214968,
"theta": -0.2962013,
"name": "",
"map": "office",
"path": "path2",
"index": 1,
"type": "floor",
"levels": [
1
]
},
{
"x": -0.967,
"y": -2.864,
"theta": 1.570796,
"name": "",
"map": "out",
"path": "path1",
"index": 0,
"type": "floor",
"levels": [
1
]
},
{
"x": 5.470039,
"y": -0.08699174,
"theta": 0.0,
"name": "",
"map": "out",
"path": "path1",
"index": 1,
"type": "floor",
"levels": [
1
]
},
],
"connections": [
{
"_id": {
"$oid": "60ff74d3d78f798bc92b91d5"
},
// points为此连接所连接的目标点,表示可以通过一定方式在这两个点间切换
"points": [
{
"map": "office",
"path": "path2",
"index": 1,
"type": "floor",
"levels": [
1
]
},
{
"map": "out",
"path": "path1",
"index": 0,
"type": "floor",
"levels": [
1
]
}
],
"type": "direct",// 连接的方式,direct为直接连接, 如不同地图中的同一个位置
// elevator为电梯连接,用于跨楼层
"is_available": true, // 此连接是否可用,当为false时,此连接将被排除于路径规划
"id": "a05ee41f-86d3-4588-be99-4feb776848d6"
}
]
}
添加导航点连接信息
URL: /navigation/point_connections
请求方式: POST
请求参数: |参数|类型|说明| |--|--|--| |points|list|目标点信息| |type|string|连接类型,direct直接连接,表示此点为不同地图中的同一个位置。elevator电梯连接|
请求例子
{
"points": [
{
"map": "office", // 目标点所在的地图
"path": "path2", // 目标点所在的路径
"index": 1 // 目标点的序号
},
{
"map": "out",
"path": "path1",
"index": 0
}
],
"type": "direct" // 连接方式
}
返回参数:
和请求参数一致
返回示例
{
"points": [
{
"map": "office",
"path": "path2",
"index": 1
},
{
"map": "out",
"path": "path1",
"index": 0
}
],
"type": "direct",
"is_available": true,
"id": "a05ee41f-86d3-4588-be99-4feb776848d6",
"_id": {
"$oid": "60ff74d3d78f798bc92b91d5"
}
}
删除导航点之间的连接
URL: /navigation/point_connections
请求方式: DELETE
请求参数
| 名称 | 类型 | 说明 |
|---|---|---|
| id | string | 连接的id,可以通过获取连接信息查到 |
返回参数:
| 名称 | 类型 | 说明 |
|---|---|---|
| status | string | 完成状态 |
切换当前地图
注意:此切换地图API只是切换当前使用的地图文件。并不是在导航过程中切换地图。导航中切换地图可以使用/navigation/reload API
URL: /navigation/switch_map
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 切换的地图名称 |
返回参数
{
"status": "ok"
}
获取忽略区域信息
URL: /navigation/skip_area
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
| skip_area | string | 忽略区域信息,每行以空格分隔,四个数据构成一个方格。一行即是一块忽略区域的坐标信息 |
示例数据:
{
"map_name": "\u529e\u516c\u5ba4",
"path_name": "1",
"skip_area": "9.89896392822266 19.9832229614258 12.0267267227173 20.9590129852295\n"
}
修改忽略信息
URL: /navigation/skip_area
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
| skip_area | string | 忽略区域信息,每行以空格分隔,四个数据构成一个方格。一行即是一块忽略区域的坐标信息 |
示例数据:
{
"map_name": "\u529e\u516c\u5ba4",
"path_name": "1",
"skip_area": "9.89896392822266 19.9832229614258 12.0267267227173 20.9590129852295\n"
}
返回数据:
返回数据和请求数据一致
删除忽略区域信息
URL: /navigation/skip_area
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 默认为ok |
获取虚拟墙信息
URL: /navigation/virtual_wall
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
| virtual_wall | string | 每行两个数据以空格分隔,分别代表虚拟墙一个点的x和y坐标 |
示例数据:
{
"map_name": "\u529e\u516c\u5ba4",
"path_name": "1",
"virtual_wall": "5.209754 18.43822\n5.2582 18.45059\n5.306646 18.46296\n5.355093 18.47532\n5.403539 18.48769\n5.451986 18.50006\n5.500432 18.51242\n5.548879 18.52479\n5.597325 18.53716\n5.645772 18.54952\n"
}
修改虚拟墙数据
URL: /navigation/virtual_wall
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
| virtual_wall | string | 每行两个数据以空格分隔,分别代表虚拟墙一个点的x和y坐标 |
示例数据:
{
"map_name": "\u529e\u516c\u5ba4",
"path_name": "1",
"virtual_wall": "5.209754 18.43822\n5.2582 18.45059\n5.306646 18.46296\n5.355093 18.47532\n5.403539 18.48769\n5.451986 18.50006\n5.500432 18.51242\n5.548879 18.52479\n5.597325 18.53716\n5.645772 18.54952\n"
}
返回数据:
返回数据和请求数据一致
删除虚拟墙数据
URL: /navigation/virtual_wall
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| path_name | string | 路径名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 默认为ok |
设置导航初始位置
URL: /navigation/init_pose
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 初始位置x坐标 |
| y | float | 初始位置y坐标 |
| z | float | 初始位置z坐标 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 默认为ok |
生成多地图导航任务(不执行)
URL: /navigation/multi_map_task
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| from | object | 初始位置对象,包含map,path,index属性。其中map为初始位置所在地图,path为初始位置所在路径,index为初始位置的序号。level为可选参数为初始位置所在楼层 |
| to | object | 目标位置对象,其属性和初始位置一致 |
示例数据
{
"from": {
"map": "map1",
"path": "path1",
"index": 2,
},
"to": {
"map": "map2",
"path": "path2",
"index": 1,
}
}
返回参数:
返回为多地图导航任务对象
执行局部运动任务
说明: 此API会根据对应参数自动创建一个包含LocalMoveAction的任务,然后自动执行
URL: /navigation/start_local_move
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| distance | float | 机器人局部运动距离,当distance为正时向前运动,当distance为负时向后运动,单位为米 |
| angle | float | 机器人局部运动转向角度,机器人先转动对应角度再直行,单位为弧度 |
| method | int | 精准对接辅助手段,0为无,1为使用雷达 |
返回参数:
返回此任务信息
执行导航和局部运动
说明: 机器人先导航至指定目标点然后执行局部运动,如导航至1号点然后倒退。机器人会自动创建包含一个导航动作和一个局部运动动作的任务。
URL: /navigation/start_nav_and_local_move
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| index | int | 目标点index |
| distance | float | 机器人局部运动距离,当distance为正时向前运动,当distance为负时向后运动,单位为米 |
| angle | float | 机器人局部运动转向角度,机器人先转动对应角度再直行,单位为弧度 |
| method | int | 精准对接辅助手段,0为无,1为使用雷达 |
返回参数:
返回此任务信息
执行导航任务,局部任务,io任务
说明: 机器人先导航至指定目标点然后执行局部运动动作,然后再设置io电平。如导航到1号点然后倒退,再设置1号端口高电平。机器人会自动创建包含一个导航动作,一个局部运动动作和一个控制io动作的任务。
URL: /navigation/start_nav_local_move_io
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| index | int | 目标点index |
| distance | float | 机器人局部运动距离,当distance为正时向前运动,当distance为负时向后运动,单位为米 |
| angle | float | 机器人局部运动转向角度,机器人先转动对应角度再直行,单位为弧度 |
| method | int | 精准对接辅助手段,0为无,1为使用雷达 |
| level | string | 0 为低电平, 1为高电平 |
| port | string | 可以为1,2,3分别对应三个IO端口 |
返回参数:
返回此任务信息
局部移动到指定位置
说明: 调用局部移动Action,局部移动到指定位置
URL: /navigation/start_local_move_target
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| x | float | 目标位置x坐标 |
| y | float | 目标位置y坐标 |
| theta | float | 目标位置角度 |
| frame_id | string | 目标位置坐标系,可以是map或base_link |
| xy_tolerance | float | 目标位置x和y坐标允许的误差 |
| yaw_tolerance | float | 目标位置角度允许的误差 |
| timeout | float | 超时时间,单位为秒 |
| start_rotate_enable | bool | 是否允许在起点旋转 |
| target_rotate_enable | float | 是否允许在目标点旋转 |
返回参数:
返回此任务信息
导航到指定目标点
说明: 调用局部移动Action,局部移动到指定目标点位置.可用于精准对接
请求方式: GET
URL: /navigation/start_local_move_index
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| index | int | 目标点index |
| start_rotate_enable | bool | 是否允许在起点旋转 |
| target_rotate_enable | float | 是否允许在目标点旋转 |
返回参数:
返回此任务信息
风向传感器信息
说明: 获取风向传感器信息
请求方式: GET
URL: /navigation/wind_info
请求参数:
无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| current_speed | float | 当前风速,单位米/秒 |
| max_speed | float | 最大风速,单位米/秒 |
| level | float | 风速等级 |
| direction | float | 风向,单位弧度 |
获取地图二维码信息
请求方式: GET
URL: /navigation/landmarks
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称,可选参数,如果没有此参数则返回所有地图的二维码信息 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 地图名称 |
| landmarks | list | 二维码信息列表 |
生成覆盖路径
说明: 有些情况下需要机器人路径覆盖特定区域,比如清扫机器人。此API可以生成覆盖路径。
请求方式: POST
URL: /navigation/coverage_path
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| swath_angle | float | 生成路线的角度。单位度,-3 自动, -2 平行最短边,-1 平行最长边。0到180对应手动制定角度 |
| op_width | float | 生成路线的行间距,单位米 |
| turn_radius | float | 转弯半径,单位米 |
| headland_width | float | 专门用于掉头的区域宽度,这块区域通常不耕种,单位米 |
| border | list | 多边形边界,x、y两轴分量有效,z轴为0。 |
| holes | list | 多边形边界内的洞,代表障碍物之类,暂时不用未来扩展用 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 状态 |
| path | list | 覆盖路径点列表 |
示例
请求参数
{
"swath_angle": -3,
"op_width": 0.5,
"turn_radius": 0.5,
"headland_width": 0.5,
"border": [
[0, 0, 0],
[10, 0, 0],
[10, 10, 0],
[0, 10, 0],
[0, 0, 0]
],
"holes": [
[
[2, 2, 0],
[2, 3, 0],
[3, 3, 0],
[3, 2, 0],
[2, 2, 0]
]
]
}
返回参数
{
"status": "ok",
"path": [
[0, 0, 0],
[0, 0.5, 0],
[0, 1, 0],
[0, 1.5, 0],
[0, 2, 0],
[0, 2.5, 0],
[0, 3, 0],
[0, 3.5, 0],
[0, 4, 0],
[0, 4.5, 0],
[0, 5, 0],
[0, 5.5, 0],
[0, 6, 0],
[0, 6.5, 0],
[0, 7, 0],
...
]
}
获取电梯基本信息
说明: 获取电梯的基本信息,包括电梯的楼层信息,电梯的状态信息
URL: /navigation/get_elevator_info
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| elevator_name | string | 电梯名字,可选参数,当没有此参数时返回所有电梯信息 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| level | int | 电梯所在楼层 |
| direction | string | UP,DONW,STOP, 电梯运行方向 |
| state | string | 电梯状态,WAITING_OUT, NONE, WAITING_IN |
| front_door_open | bool | 前门是否打开 |
| back_door_open | bool | 后门是否打开 |
| name | string | 电梯名字 |
呼叫电梯到指定楼层
说明: 通过此API可以呼叫电梯到指定楼层
URL: /navigation/elevator_to_level
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| elevator_name | string | 电梯名字 |
| level | int | 目标楼层 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| result | bool | 电梯呼叫是否成功 |
控制电梯开关门
说明: 通过此API可以控制电梯的前门和后门的开关
URL: /navigation/elevator_open_door
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| elevator_name | string | 电梯名字 |
| open | int | 0关门,1开门 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | ok |
裁剪点云地图
说明:裁剪地图,仅保留目标区域内的点云数据
URL:navigation/crop_map
请求方式:GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标地图名称 |
| left | float | 裁剪区域左边界坐标 |
| right | float | 裁剪区域右边界坐标 |
| top | float | 裁剪区域上边界坐标 |
| bottom | float | 裁剪区域下边界坐标 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 裁剪操作是否成功 |
还原裁剪点云地图
说明:还原裁剪地图,恢复到裁剪前的状态
URL:navigation/revert_crop_map
请求方式:GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| map_name | string | 目标地图名称 |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 还原操作是否成功 |
任务相关API
机器人的一个动作被定义为Action。比如移动到[1,1]点。又如播放一段声音。一系列的Action组合在一起构成一个任务即Task。通过对Action和Task进行操作,我们可以轻松的控制机器人实现一系列动作。
Task 和 Action 有以下的一些状态
WAITTING 等待执行 WORKING 正在执行 PAUSED 暂停中 CANCELLED 被取消 ERROR 错误 COMPLETE 完成
获取任务信息
URL: /task
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务id,可选参数。若无此参数则返回所有的task |
返回参数:
task 数据信息
创建任务
URL: /task
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| name | string | 创建任务的名称,可以是任意字符串 |
| sub_tasks | list | 包含子任务信息的列表,子任务可以是task也可以是action |
| loop_flag | bool | 可选参数,是否自动循环任务 |
例子:
{
"name": "task",
"sub_tasks": [
{
"type": "nav_action",
"x": 0,
"y": 0,
"theta": 0
},
{
"type": "nav_action",
"x": 1,
"y": 1,
"theta": 1
},
{
"type": "nav_action",
"x": 2,
"y": 2,
"theta": 2
},
],
"loop_flag": false,
}
返回参数:
成功创建的task数据
示例返回数据
{
"name": "test task",
"loop_flag": false,
"id": "47a97e4e-9327-4214-a780-fd5a2ae39ee3",
"state": "WAITTING",
"sub_tasks": [],
"progress": 0,
"current_task": null
}
修改任务
URL: /task
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务id |
| name | string | 可选参数,新的任务名称 |
| loop_flag | bool | 可选参数,是否循环任务 |
| sub_tasks | list | 包含子任务信息的列表 |
返回参数:
修改后的任务数据
示例返回数据
{
"name": "test task",
"loop_flag": false,
"id": "47a97e4e-9327-4214-a780-fd5a2ae39ee3",
"state": "WAITTING",
"sub_tasks": [],
"progress": 0,
"current_task": null
}
删除任务
URL: /task
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标删除任务的id |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 目标任务是否删除成功 |
启动任务
URL: /task/start
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务的id |
返回参数:
启动后的任务信息
暂停任务
URL: /task/pause
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务的id |
返回参数:
暂停后的任务信息
继续任务
URL: /task/resume
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务的id |
返回参数:
继续后的任务信息
取消任务
URL: /task/stop
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务的id,可选参数。当没有id时则取消所有任务 |
返回参数:
取消后的任务信息
循环执行任务
URL: /task/loop
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标任务的id |
| loop_flag | bool | 是否循环任务 |
获取动作Action信息
URL: /action
请求方式: GET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标action的id。可选参数,当没有此参数时返回数据库中所有保存的action |
返回参数:
目标action数据信息
创建动作Action信息
URL: /action
请求方式: POST
说明:
目前Action有以下几个类别。
callback_action 回调动作
当执行此动作时机器人将会向指定的地址(url),以指定的方式(method),发送指定的数据(data)
| 属性 | 类型 | 说明 |
|---|---|---|
| url | string | 回调动作地址 |
| method | string | 回调请求方法 |
| data | object | 需要回调发送到的数据 |
sleep_action 等待动作
当执行此动作时机器人将等待对应的时间
| 属性 | 类型 | 说明 |
|---|---|---|
| wait_time | float | 等待的时间,单位秒 |
upload_map_action 上传地图至指定调度服务器动作
执行此任务时机器人将根据调用参数将地图数据上传至指定的调度服务器
| 属性 | 类型 | 说明 |
|---|---|---|
| server_id | string | 调度服务器id |
download_map_action 从调度服务器下载地图动作
执行此动作时机器人将根据参数从指定的调度服务器下载地图数据
| 属性 | 类型 | 说明 |
|---|---|---|
| server_id | string | 调度服务器id |
| map_id | string | 下载的地图id |
nav_action 导航动作
执行此动作时机器人将移动到参数指定位置
| 属性 | 类型 | 说明 |
|---|---|---|
| x | float | 目标位置x坐标,单位为米 |
| y | float | 目标位置y坐标,单位为米 |
| theta | float | 目标位置机器人朝向角度,单位为弧度 |
| map | string | 目标位置所在地图名称, 可选参数 |
| path | string | 目标位置所在路径名称, 可选参数 |
| index | int | 目标位置序号, 可选参数 |
| timeout | int | 超时时间,可选参数。如果机器人在执行任务是停止超过timeout秒,则任务返回Fail或Error |
charge_action 充电动作
在充电桩附近执行此动作机器人将自动对接充电桩并进行充电
| 属性 | 类型 | 说明 |
|---|---|---|
| x | float | 充电桩位置x坐标,单位为米 |
| y | float | 充电桩位置y坐标,单位为米 |
| theta | float | 充电正面方向,单位为弧度 |
local_move_action 局部运动动作
局部运动动作用于机器人精准对接过程。比如控制机器人倒车进入车库等等。
| 属性 | 类型 | 说明 |
|---|---|---|
| distance | float | 机器人局部运动距离,当distance为正时向前运动,当distance为负时向后运动,单位为米 |
| angle | float | 机器人局部运动转向角度,机器人先转动对应角度再直行,单位为弧度 |
| method | int | 精准对接辅助手段,0为无,1为使用雷达 |
wait_req_action 等待请求动作
等待http请求动作。此动作会一直等待直到超时或者 /action/update_wait_req 被调用
| 属性 | 类型 | 说明 |
|---|---|---|
| timeout | int | 超时时间,可选参数 |
switch_map_action 切换地图动作
| 属性 | 类型 | 说明 |
|---|---|---|
| map | string | 切换的目标地图名称 |
| path | string | 切换的目标路径名称 |
| start_index | int | 切换起始位置序号,用于地图切换后的位置初始化 |
change_setting_action 更改系统设置
| 属性 | 类型 | 说明 |
|---|---|---|
| settings | object | 修改的系统参数 |
| init_settings | object | 可选参数,当有此参数时,在包含change_setting_action的task执行完毕或取消后自动恢复成init_setting |
roslaunch_action 启动ros程序
| 属性 | 类型 | 说明 |
|---|---|---|
| launch_cmd | string | ros启动指令,如roslaunch xiaoqiang_track xiaoqiang_track.launch |
io_action 控制io动作
| 属性 | 类型 | 说明 |
|---|---|---|
| level | string | 0 为低电平, 1为高电平 |
| port | string | 可以为1,2,3分别对应三个IO端口 |
elevator_req_action 电梯请求动作
说明:机器人和电梯交互的Action。可以通过此动作控制电梯上下和开关门
| 属性 | 类型 | 说明 |
|---|---|---|
| level | int | 目标楼层,可选参数,当有此参数时表示机器人要通过电梯去特定楼层。执行action时要保证机器人在电梯内 |
| direction | string | 控制电梯外机按钮,可选参数。当为up时自动按下电梯外机上按钮,为down时自动按下电梯下按钮。执行action时要保证机器人在电梯外 |
当电梯到达目标楼层且开门时此Action进入COMPLETE状态
none_stop_nav_action 不停止导航动作
说明: 到达目标点附近后不停止的导航动作。用于流畅切换目标点,连续执行none_stop_nav_action动作可以实现流畅的连续到达目标点中间不机器人不停止。
| 属性 | 类型 | 说明 |
|---|---|---|
| x | float | 目标点x坐标 |
| y | float | 目标点y坐标 |
| radius | float | 目标半径,当机器人到达目标点radius范围内,此任务返回complete状态 |
blockly_action 自动化任务动作
说明: 执行自动化任务的动作。自动化任务中的API模块可以定义通过API触发的行为。当此动作执行时会触发对应的自动化动作。
| 属性 | 类型 | 说明 |
|---|---|---|
| api_key | string | 自动化动作的触发string。注意创建自动化动作时api_key不要设置重复。否则可能会导致部分任务无法触发 |
video_record_action 录制视频动作
说明: 录制视频动作。执行此动作时机器人会开始录制视频,当任务结束时会自动停止录制。视频保存在机器人主目录的Videos文件夹下。注意当硬盘空间不足的时候,程序会自动删除旧的视频文件,只保留最新的部分内容。
| 属性 | 类型 | 说明 |
|---|---|---|
| timestamp | int | 视频开始的时间戳,视频保存时会采用这个时间戳作为文件名,如1683278160650.mkv |
| duration | int | 视频录制时长,单位为秒。此参数为可选参数,默认为10秒 |
| topic | string | 视频录制的topic,此参数为可选参数,默认为/camera_node/image_raw。前摄像头话题为/multi/front/image_raw,后摄像头话题为/multi/back/image_raw |
| video_url | string | 视频录制的地址,如果有此参数上面topic参数将不再生效。程序会自动从此地址下载视频进行保存。注意只支持http协议 |
| filename | str | 录音文件名,此参数为可选参数,默认为时间戳 |
image_action 拍照动作
说明: 拍照动作。执行此动作时机器人会拍照并保存在机器人主目录的Pictures文件夹下。
| 属性 | 类型 | 说明 |
|---|---|---|
| topic | string | 拍照的topic,此参数为可选参数,默认为/camera_node/image_raw。前摄像头话题为/multi/front/image_raw,后摄像头话题为/multi/back/image_raw |
| timestamp | int | 拍照的时间戳,照片保存时会采用这个时间戳作为文件名,如1683278160650.png |
audio_record_action 录音动作
说明: 录音动作。执行此动作时机器人会开始录音,录音文件保存至Videos文件夹下。
| 属性 | 类型 | 说明 |
|---|---|---|
| timestamp | int | 录音开始的时间戳,录音保存时会采用这个时间戳作为文件名,如1683278160650.wav |
| duration | int | 录音时长,单位为秒。此参数为可选参数,默认为10秒 |
| filename | str | 录音文件名,此参数为可选参数,默认为时间戳 |
lbt_elevator_req_action
说明: 鲁邦通梯控请求动作
| 属性 | 类型 | 说明 |
|---|---|---|
| from_level | int | 起始楼层 |
| to_level | int | 目标楼层 |
| cmd | string | enter或者leave,表示现在是进电梯请求还是出电梯请求 |
lbt_elevator_ack_action
说明: 鲁邦通梯控动作执行完成后的响应动作
slide_action
说明: 滑台移动动作
| 属性 | 类型 | 说明 |
|---|---|---|
| mode | int | 0 点动模式,1 位置模式, 2 回零, 3 百分比模式 |
| speed | float | 运行速度,单位米/秒,0值表示用默认值,点动模式位置可以取负值,位置模式取值范围0到正无穷,回零模式速度最小0.05,内部有限位保护。 |
| time | float | 点动模式运行时间,单位秒,其它模式时无效,取值范围0.1到正无穷,内部有限位保护。 |
| pose | float | 位置模式下相对零点的位置,单位米;点动模式下,这个值无效。取值范围不限,内部有限位保护。0值表示停止不动。百分比模式下,取值范围0到1。 |
jacking_action
说明: 顶升移动动作
| 属性 | 类型 | 说明 |
|---|---|---|
| mode | int | 0 点动模式,1 位置模式, 2 回零, 3 百分比模式 |
| speed | float | 运行速度,单位米/秒,0值表示用默认值,点动模式位置可以取负值,位置模式取值范围0到正无穷,回零模式速度最小0.05,内部有限位保护。 |
| time | float | 点动模式运行时间,单位秒,其它模式时无效,取值范围0.1到正无穷,内部有限位保护。 |
| pose | float | 位置模式下相对零点的位置,单位米;点动模式下,这个值无效。取值范围不限,内部有限位保护。0值表示停止不动。百分比模式下,取值范围0到1。 |
jacking_rotate_action
说明: 顶升旋转动作
| 属性 | 类型 | 说明 |
|---|---|---|
| mode | int | 0 点动模式,1 位置模式, 2 回零, 3 百分比模式 |
| speed | float | 运行速度,单位弧度/秒,0值表示用默认值 |
| time | float | 点动模式运行时间,单位秒,其它模式时无效,取值范围0.1到正无穷,内部有限位保护。 |
| angle | float | 位置模式下相对零点的位置,单位弧度 |
| frame_id | string | 坐标系,可以是map或者base_link |
local_move_target_action
说明: 局部运动到指定位置动作
| 属性 | 类型 | 说明 |
|---|---|---|
| x | float | 目标位置x坐标 |
| y | float | 目标位置y坐标 |
| theta | float | 目标位置角度 |
| frame_id | string | 目标位置坐标系,可以是map或base_link |
| xy_tolerance | float | 目标位置x和y坐标允许的误差 |
| yaw_tolerance | float | 目标位置角度允许的误差 |
| timeout | float | 超时时间,单位为秒 |
| start_rotate_enable | bool | 是否允许在起点旋转 |
| target_rotate_enable | float | 是否允许在目标点旋转 |
tts_action
说明: 语音合成动作
| 属性 | 类型 | 说明 |
|---|---|---|
| text | string | 合成的文本 |
onvif_camera_move_action
说明: onvif摄像头移动动作
| 属性 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| x | float | 摄像头横向转动角度 |
| y | float | 摄像头纵向转动角度 |
| zoom | float | 摄像头缩放比例 |
onvif_camera_snapshot_action
说明: onvif摄像头拍照动作
| 属性 | 类型 | 说明 |
|---|---|---|
| ip | string | 摄像头IP地址,可以为空字符串。当为空字符串时就使用从局域网内找到的第一个摄像头ip |
| port | int | 摄像头端口 |
| username | string | 摄像头用户名 |
| password | string | 摄像头密码 |
| channel | int | 摄像头图像通道,可选参数,没有就默认为1通道 |
创建action
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| type | string | action类型,必须是以上几种aciton的一个 |
| task_id | string | 创建的action所属的task,可选参数。当有此参数时将新建action加入对应task,没有此参数时自动创建一个新的临时task(task不会被保存至数据库)并将action添加进task |
其他参数和对应的Action类型相关
示例请求参数:
{
"type": "sleep_action",
"wait_time": 2
}
返回参数:
包含新创建的action的task
示例返回参数:
{
"name": "auto task",
"loop_flag": false,
"id": "c50d355f-9155-4a17-ade6-a61b40820b43",
"state": "WAITTING",
"sub_tasks": [
{
"wait_time": 2,
"state": "WAITTING",
"type": "sleep_action",
"id": "3bbbed8f-c0dc-4a94-8d6f-05006c943818"
}
],
"progress": 0,
"current_task": null
}
修改动作Action信息
URL: /action
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标action的id |
其他参数和Action类型相关
返回参数:
经过修改的Action数据
删除动作Action信息
URL: /action
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标action的id |
触发等待动作
说明: 对于wait_req_action,机器人会一直等待http请求触发,直到触发后才继续执行下面的任务。
URL: /action/update_wait_req
请求方式: GET
请求参数: 无
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 成功为OK |
自动化任务API
获取自动化任务信息
URL: /blockly_task
请求方式: GET
请求参数: 无
返回参数:
所有的自动化任务,包括在执行的和未在执行的任务
创建自动化任务
URL: /blockly_task
请求方式: POST
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| py | string | python程序内容,在后端自动化执行的程序。使用客户端时会自动把图形化程序转化成python程序 |
| blocklyxml | string | 图形化程序内容 |
| title | string | 自动化任务标题 |
| description | string | 自动化任务描述 |
| is_enabled | bool | 是否启用自动化任务 |
返回参数:
创建的自动化任务信息
修改自动化任务
URL: /blockly_task
请求方式: PUT
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标自动化任务的id |
| py | string | python程序内容,可选参数,如果没有此参数则保持原有内容不变 |
| blocklyxml | string | 图形化程序内容,可选参数,如果没有此参数则保持原有内容不变 |
| title | string | 自动化任务标题,可选参数,如果没有此参数则保持原有内容不变 |
| description | string | 自动化任务描述,可选参数,如果没有此参数则保持原有内容不变 |
| is_enabled | bool | 是否启用自动化任务,可选参数,如果没有此参数则保持原有内容不变 |
返回参数:
修改后的自动化任务信息
删除自动化任务
URL: /blockly_task
请求方式: DELETE
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| id | string | 目标自动化任务的id |
返回参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| status | string | 目标自动化任务是否删除成功 |
行为树相关API
行为树API是在上面任务API的基础上进行扩展的API。因为在实际使用任务API的时候,我们会遇到很多无法满足要求的情况。比如以上的任务API是没有逻辑判断的,我们无法让机器人在某些情况下执行一个动作,在另一个情况下执行另一个动作。
什么是行为树
行为树是一种用于控制机器人行为的树形结构。机器人在执行行为树的时候,会从根节点开始,根据条件判断执行对应的行为,然后再根据行为执行结果执行下一个行为。
行为树分为控制节点和执行节点。控制节点就类似于之前的Task,用于对具体执行过程的控制。执行节点就类似于之前的Action,用于具体的执行动作。所有的节点的可能状态和Task一样,只不过Task状态基础上增加了FAIL状态。当节点执行失败时返回Fail状态。注意Fail状态和Error状态不一样。出现Fail状态时行为树会根据状态执行不同的流程。但是Error状态会导致行为树停止执行。
下面以一个例子作为说明
假设我们需要机器人乘坐电梯从一楼到二楼。使用Task我们的大致流程如下。
到达一楼电梯门口 -> 呼叫电梯 -> 进入电梯等待电梯到达二楼 -> 出电梯,到达二楼电梯门口
在实际使用中还需要考虑到电梯被人或货物占用机器人无法进入的情况。
更完善的流程如下
到达一楼电梯门口 -> {呼叫电梯 -> 进入电梯} -> 电梯被占用 -> {取消电梯呼叫 -> 回到一楼电梯外} -> {呼叫电梯 -> 进入电梯} -> 电梯被占用 -> {取消电梯呼叫 -> 回到一楼电梯外} -> ... -> 成功进入电梯 -> 等待电梯到达二楼 -> 出电梯,到达二楼电梯门口
这样我们可以重新组织一下
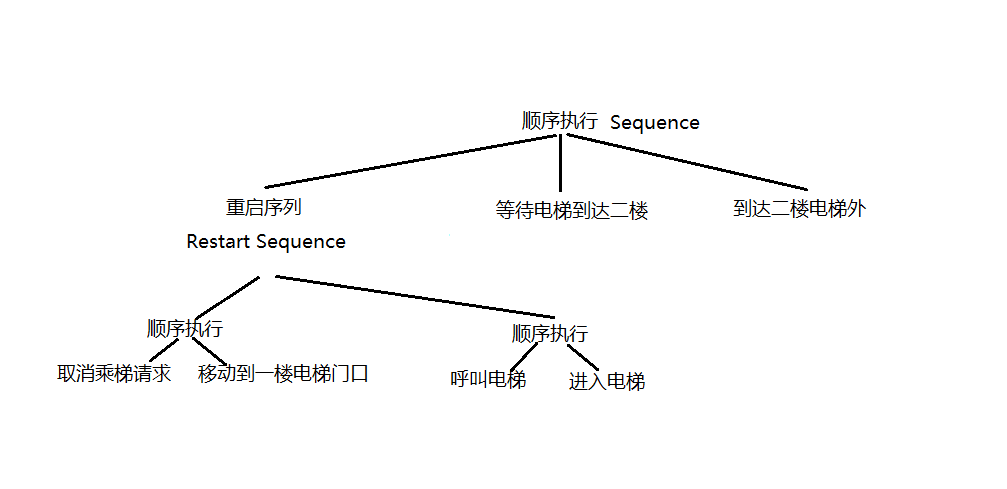
上面的行为树用到了以下几个控制节点。首先是顺序执行节点,此控制节点顺序执行自己的子任务。然后是重启序列节点,此节点会顺序执行所有子节点,如果有子节点失败则从头开始重新执行自己的子节点。
现在我们来看一下行为树的执行过程。
顺序执行节点 -> 重启序列节点 -> 顺序执行节点 -> 取消乘梯请求 -> 移动到一楼电梯门口 -> 顺序执行节点 -> 呼叫电梯 -> 进入电梯 -> 如果进入电梯失败,则重启序列节点会重新执行第一个顺序执行节点。也就是 取消乘梯请求->移动到一楼电梯门口,之后机器人会重新叫电梯,进入电梯。直到进入电梯成功。
从上面的例子可以看到,通过合理的组合各种节点类型,我们就可以让机器人在各种复杂的情况下做出正确的判断和动作。
当前支持的行为树控制节点
顺序(sequence)节点
control_type: sequence
顺序执行所有子节点,如果任意一个子节点返回Fail则返回Fail,如果任意子节点返回Error则返回Error,如果所有子节点都返回Complete则返回Complete
并行(parallel)节点
control_type: parallel
| 参数 | 类型 | 说明 |
|---|---|---|
| success_count | int | 并行执行的任务成功数超过success_count时状态变为COMPLETE |
并行执行所有子节点,直到第success_count个子节点返回Complete。如果success_count为0则需要所有子节点都返回Complete才返回Complete。
fallback节点
control_type: fallback
包含两个子节点,首先执行第一个子节点,如果第一个子节点返回Fail则执行第二个子节点,如果第二个子节点返回Fail则返回Fail。
反转(flip)节点
control_type: flip
包含一个子节点,执行子节点,如果子节点返回Fail则返回Complete,如果子节点返回Complete则返回Fail,如果子节点返回Error则返回Error。
循环节点(loop)节点
control_type: loop
| 参数 | 类型 | 说明 |
|---|---|---|
| target_loop_count | int | 目标循环次数 |
循环依次执行所有子节点, 直到循环次数达到target_loop_count。如果target_loop_count为0则无限。如果有子节点返回Fail则返回Fail。
强制失败(force_fail)节点
control_type: force_fail
包含一个子节点,执行子节点,如果子节点返回Fail则返回Fail,如果子节点返回Complete则返回Fail,如果子节点返回Error则返回Error。
强制成功(force_success)节点
control_type: force_success
包含一个子节点,执行子节点,如果子节点返回Fail则返回Complete,如果子节点返回Complete则返回Complete,如果子节点返回Error则返回Error。
重启顺序(restart_sequence)节点
control_type: restart_sequence
依次执行所有子节点,如果子节点返回Fail则从头开始执行子节点,如果所有子节点返回Complete则返回Complete,如果子节点返回Error则返回Error。
重试顺序(retry_sequence)节点
control_type: retry_sequence
依次执行所有子节点,如果子节点返回Fail则重新执行此子节点,如果所有子节点返回Complete则返回Complete,如果子节点返回Error则返回Error。
重试到成功(retry_until_success)节点
control_type: retry_until_success
只能有一个子节点,如果子节点返回Fail则重新执行此子节点,直到子节点返回Complete。
创建和控制行为树
行为树的创建方式和Task一样。只是在Task的属性上增加了control_type,同时根据不同的control_type增加了不同的属性。下面是一个创建的例子
# 创建任务
task = requests.post(
"http://127.0.0.1:3546/api/v1/task",
json={
"name": "test_sequence_task",
"control_type": "sequence",
"sub_tasks": [
{
"type": "nav_action",
"map": "1",
"path": "1",
"index": 1,
"x": 4.686,
"y": -1.196,
"theta": 0,
},
{
"type": "nav_action",
"map": "1",
"path": "1",
"index": 1,
"x": -0.45657,
"y": -3.551,
"theta": 1.94446,
},
{
"type": "charge_action",
"x": -0.45657810000000004,
"y": -3.551895,
"theta": 1.94446,
},
],
},
)
# 启动任务
requests.get("http://127.0.0.1:3546/api/v1/task/start?id=" + task.json()["id"])
print(json.dumps(task.json(), indent=4))
上面的例子创建了一个序列控制节点,包含了三个子节点。机器人会依次执行三个节点。序列控制节点的效果和task基本是一样的。
上面的程序正常应该会有以下输出
{
"id": "7976cd0d-fa77-485a-a1a3-af93fccad96f",
"name": "test_sequence_task",
"current_task": null,
"state": "WAITTING",
"sub_tasks": [
{
"type": "nav_action",
"id": "e664c2dc-5168-40a5-9977-c5dbaf53d609",
"x": 4.686,
"y": -1.196,
"theta": 0,
"state": "WAITTING",
"result": "",
"index": 1,
"map": "1",
"path": "1",
"progress": 0,
"current_location": {
"x": -1,
"y": -1,
"theta": -1
},
"current_distance": -1,
"timeout": 0
},
{
"type": "nav_action",
"id": "4cdd1711-211a-4119-8384-e3de4ec5ad07",
"x": -0.45657,
"y": -3.551,
"theta": 1.94446,
"state": "WAITTING",
"result": "",
"index": 1,
"map": "1",
"path": "1",
"progress": 0,
"current_location": {
"x": -1,
"y": -1,
"theta": -1
},
"current_distance": -1,
"timeout": 0
},
{
"type": "charge_action",
"id": "71d60425-fef0-4577-a2c3-92f1ab05ebac",
"x": -0.45657810000000004,
"y": -3.551895,
"theta": 1.94446,
"state": "WAITTING",
"result": "",
"progress": 0
}
],
"progress": 0,
"control_type": "sequence"
}
下面是一个更复杂的例子
task = requests.post(
"http://127.0.0.1:3546/api/v1/task",
json={
"name": "test_nested_task",
"control_type": "sequence",
"sub_tasks": [
{
"name": "s1",
"control_type": "sequence",
"sub_tasks": [
{
"name": "s11",
"control_type": "sequence",
"sub_tasks": [
{
"type": "sleep_action",
"wait_time": 5,
},
{
"type": "tts_action",
"text": "测试",
},
],
},
{
"name": "s12",
"control_type": "sequence",
"sub_tasks": [
{
"type": "sleep_action",
"wait_time": 5,
},
{
"type": "tts_action",
"text": "测试",
},
],
},
],
},
{
"name": "s2",
"control_type": "sequence",
"sub_tasks": [
{
"name": "s21",
"control_type": "sequence",
"sub_tasks": [
{
"type": "sleep_action",
"wait_time": 5,
},
{
"type": "tts_action",
"text": "测试",
},
],
},
{
"name": "s22",
"control_type": "sequence",
"sub_tasks": [
{
"type": "sleep_action",
"wait_time": 5,
},
{
"type": "tts_action",
"text": "测试",
},
],
},
],
},
],
},
)
requests.get("http://127.0.0.1:3546/api/v1/task/start?id=" + task.json()["id"])
print(json.dumps(task.json(), indent=4))
上面的例子中包含了嵌套的行为树。机器人会依次执行s1,s2两个子任务。s1,s2两个子任务又会依次执行s11,s12和s21,s22两个子任务。最终机器人会依次执行s11,s12,s21,s22四个子任务。
对于暂停,取消,继续等操作和Task的API是一样的。
黑板参数
在有些情况下我们需要节点之间共享参数。比如语音识别节点的结果可以作为输出参数给语音播放节点使用。这时我们就可以使用黑板参数。黑板参数是一种全局的参数,所有节点都可以访问。下面是一个使用黑板参数的例子。
task = requests.post(
"http://127.0.0.1:3546/api/v1/task",
json={
"name": "test_blackboard",
"control_type": "sequence",
"blackboard": {"test": "测试黑板数据"},
"sub_tasks": [
{
"type": "tts_action",
"text": "不使用黑板数据",
},
{
"type": "sleep_action",
"wait_time": 5,
},
{
"type": "tts_action",
"text": "{test}",
},
],
},
)
requests.get("http://127.0.0.1:3546/api/v1/task/start?id=" + task.json()["id"])
print(json.dumps(task.json(), indent=4))
所有的节点都共享一个黑板参数。在上面的例子中,我们在创建任务的时候传递了一个黑板参数。黑板参数是一个json对象。在tts_action节点中我们可以使用{test}的方式来使用黑板参数中的数据。在上面的例子中,机器人会先说出“不使用黑板数据”,然后等待5秒,最后说出“测试黑板数据”。在使用黑板参数变量的时候用大括号括起来即可。
Websocket相关API
对于需要高频率获取的数据我们提供了websocket api。比如我们可能需要很高频率的获取机器人的位置,速度等信息。
websocket默认端口3547
URL格式: ws://192.168.0.132:3547/topicName?token=28b1c500400611ebb805493c9303c705
其中192.168.0.132为机器人IP,28b1c500400611ebb805493c9303c705为机器人token。在开启token验证时此参数是必须的,反之则不需要。
topicName为数据对应的ros话题名称。理论上可以订阅机器人内部所有的ros话题。返回的数据为ros话题数据转换成的json数据
注意在开启websocket连接后要定期发送ping消息,否则连接可能会自动断开。比如可以每秒发送一个ping消息。
对于6.2.1及以后版本websock也可以用于向机器人发送ros话题。具体数据结构可以先打印订阅的话题参考一下。发送的数据结构和接收的数据结构一样。
下面是常用的接口
获取GalileoStatus
GalileoStatus数据定义可以参照串口api中GalileoStatus的说明。
topicName: /galileo/status
返回数据为json
获取温湿度及可燃气体数据
TopicName: /bw_env_sensors/EnvSensorData
返回数据
float temperature; // 温度,单位摄氏度
float rh; // 相对湿度 %RH
float smoke; // 烟雾 ppm
float pm1_0; // pm1.0 ug/m^3
float pm2_5; // pm2.5 ug/m^3
float pm10; // pm10 ug/m^3
float lel; // 可燃气体 ppm
float noise; // 噪声 db
获取光照度和空气传感器数据
TopicName: /bw_env_sensors/AirSensorData
返回数据
float temperature; // 温度,单位摄氏度
float rh; // 相对湿度 %RH
float co2; // 烟雾 ppm
float illuminance; // lux
对于跨地图导航的说明
在日常使用中,我们经常会遇到需要跨地图导航的情况。比如在不同楼层间进行导航,在不同的仓库区域中进行导航。Galileo API针对这种场景也进行了专门优化。具体的使用方法如下。
我们以跨楼层导航为例,首先我们要创建不同楼层的地图。然后在每个楼层中分别绘制导航点和导航路径。保证机器人可以在各个楼层正常使用。假设一层的地图为map1,二层的地图为map2。一层二层之间以电梯相连接。
为了使机器人能够通过电梯跨楼层,我们需要在地图中添加电梯信息。在一层和二层的电梯门口分别添加添加一个导航点。比如,一层中的电梯导航点为1号点,二层中的电梯导航点为0号点。然后我们需要给这两个点添加连接信息,告诉机器人我们可以通过一定方式从map1中的1号点到达map2中的0号点。
下面是一个具体的连接数据例子
{
"points": [
{
"x": 1.624922, // 导航点 x 坐标
"y": -0.372011, // 导航点 y 坐标
"theta": 0.0, // 导航点角度
"name": "", // 导航点名称
"map": "map1", // 导航点所在地图名称
"path": "path1", // 导航点所在地图路径
"index": 0 // 导航点序号
},
{
"x": 0.8710775,
"y": -0.09214968,
"theta": -0.2962013,
"name": "",
"map": "map1",
"path": "path1",
"index": 1
},
{
"x": -0.967,
"y": -2.864,
"theta": 1.570796,
"name": "",
"map": "map2",
"path": "path1",
"index": 0
},
{
"x": 5.470039,
"y": -0.08699174,
"theta": 0.0,
"name": "",
"map": "map2",
"path": "path1",
"index": 1
},
],
"connections": [
{
"_id": {
"$oid": "60ff74d3d78f798bc92b91d5"
},
// points为此连接所连接的目标点,表示可以通过一定方式在这两个点间切换
"points": [
{
"map": "map1",
"path": "path1",
"index": 1
},
{
"map": "map2",
"path": "path1",
"index": 0
}
],
"type": "direct",// 连接的方式,direct为直接连接, 如不同地图中的同一个位置
// elevator为电梯连接,用于跨楼层
"is_available": true, // 此连接是否可用,当为false时,此连接将被排除于路径规划
"id": "a05ee41f-86d3-4588-be99-4feb776848d6"
}
]
}
机器人在知道这些信息之后,我们通过api向机器人发布目标点,机器人就会自动根据连接信息切换地图并移动至目标点。
比如机器人现在在map1的0号点,我们需要机器人移动至map2中的1号点。机器人就会自动先移动到map1中的1号点。然后通过电梯移动至二层区域,移动至map2中的0号点,并切换至map2地图。然后移动至map2中的1号点。
机器人跨地图自动规划程序会考虑连接的可用性,总的移动距离,切换地图的次数,经过的目标点数等等细信息,最终为用户提供一个最优的路线。 地图的自动切换也并不仅限于两个,实际上只要地图之间有合适的连接信息,程序会自动的搜索最优的切换方式。比如map1和map2之间有连接,map2和map3之间有连接。那么机器人就会在运动过程中自动的由map1切换至map2然后切换至map3。
实际调用API时需要两个接口。/navigation/point_connections 用于添加点之间的连接信息。/navigation/start_nav_task 用于发布导航任务,注意在调用时添加map和path参数。详细说明请查看对应API文档。目前支持的连接方式只有direct连接,电梯支持尚在开发之中。
此程序会调用获取机器人当前电量,机器人当前位置,控制机器人向前移动0.5m的API。注意把代码里面的机器人IP换成自己的机器IP