Linux下的安装
通过Debian包安装
在Beta2版本我们生成了ROS2的deb软件包(用于Ubuntu 16.04版本)。这些文件在一个为了测试用的临时软件源内。下面的链接和指令用于安装最新的ROS2版本-当前版本ardent。
相关资源信息
- Jenkins Instance
- Repositories
- Status Pages ( amd64 arm64)
设置软件源
想要安装deb软件包,你需要现在自己的apt软件源列表内添加我们的软件源。
首先你要像下面一样添加gpg密钥到自己的电脑中
sudo apt update && sudo apt install curl
curl http://repo.ros2.org/repos.key | sudo apt-key add -
然后执行下面的指令添加软件源到自己的apt源列表中
sudo sh -c 'echo "deb [arch=amd64,arm64] http://repo.ros2.org/ubuntu/main xenial main" > /etc/apt/sources.list.d/ros2-latest.list'
安装ROS2软件包
下面的指令会安装所有的ros-ardent-* 软件包除了ros-ardent-ros1-bridge 和 ros-ardent-turtlebot2-*。因为这两个软件包依赖于ROS 1的软件包。
按照下面的指令安装对应的软件包
sudo apt update
sudo apt install `apt list "ros-ardent-*" 2> /dev/null | grep "/" | awk -F/ '{print $1}' | grep -v -e ros-ardent-ros1-bridge -e ros-ardent-turtlebot2- | tr "\n" " "`
环境变量设置
source /opt/ros/ardent/setup.bash
如果你安装了Python的软件包 argcomplete( 0.8.5 或以上版本)你可以通过执行下面的指令来为ROS2的命令行工具添加自动补全功能。
source /opt/ros/ardent/share/ros2cli/environment/ros2-argcomplete.bash
argcomplete可以通过
sudo pip install argcomplete
来安装。
选择 RMW 实现
默认的RMW实现是 FastRTPS。
通过设置环境变量 RMW_IMPLEMENTATION=rmw_opensplice_cpp。你可以切换成OpenSplice。
额外的依赖于ROS1的软件包
ros1_bridge和TurtleBot的例子程序一样都是依赖于ROS1的软件包。
为了能够安装这些软件包,请安装这里的说明添加ROS1的软件源。
如果你在使用docker,你可以设置docker image为ros:kinetic或osrf/ros:kinetic-desktop。由于软件已经集成在镜像中这样就省去了配置安装的麻烦。
安装完成之后,现在你可以开始安装下面剩余的软件包了。
sudo apt update
sudo apt install ros-ardent-ros1-bridge ros-ardent-turtlebot2-*
当然如果你对这些软件包没有兴趣,也可以不用安装。
Windows下的安装
系统要求
在beta-1版本我们支持Windows8.1和Windows10. 在beta-2版本我们只支持Windows10。
安装依赖
安装Chocolatey
Chocolatey 是一个windows下的软件包管理程序。可以通过他们的安装说明安装。
之后你会用Chocolatey来安装其他开发工具
安装Python
打开一个命令行工具。同时按下Win + R在弹出的窗口中输入cmd。在命令行工具中输入下面的指令通过Chocolatey来安装Python。
choco install -y python
注意如果安装失败,比如我就遇到了这个情况。你可以手动安装,直接下载Python官网的安装包,然后安装,不过要安装到C:\Python36这个路径下面。
安装OpenSSL
从这个页面中下载OpenSSL安装包。
按照默认设置安装这个软件。接着添加环境变量(下面的指令默认你是按照默认参数安装的)
setx -m OPENSSL_CONF C:\OpenSSL-Win64\bin\openssl.cfg- 添加 C:\OpenSSL-Win64\bin\ 到你的PATH环境变量中
安装Visual Studio Community 2015
Microsoft 提供了一个Visual Studio的免费版本,叫做community。我们可以用它来编译ROS2的应用程序。
建议选择英文版安装,因为出错时的错误信息是英语,这样搜索的时候更容易搜到。
https://www.visualstudio.com/vs/older-downloads/
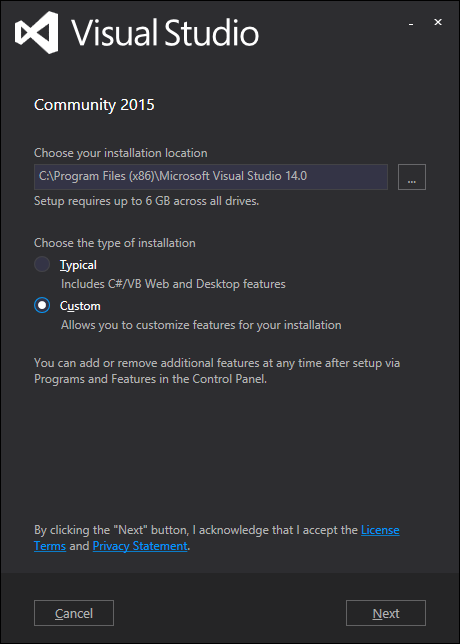
确保在安装时选择了Visual C++的功能。首先选择Custom installlation
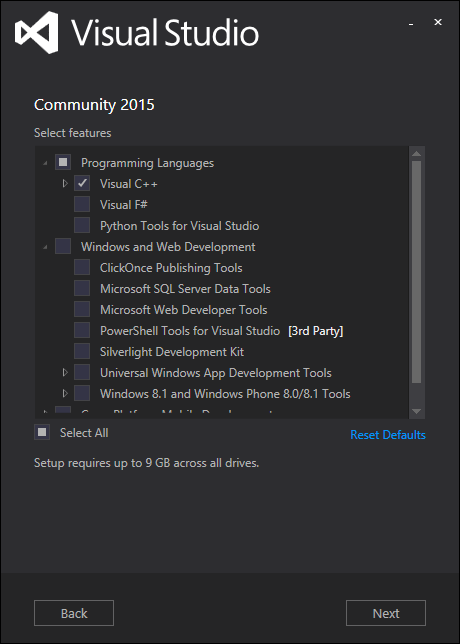
接着选上Visual C++
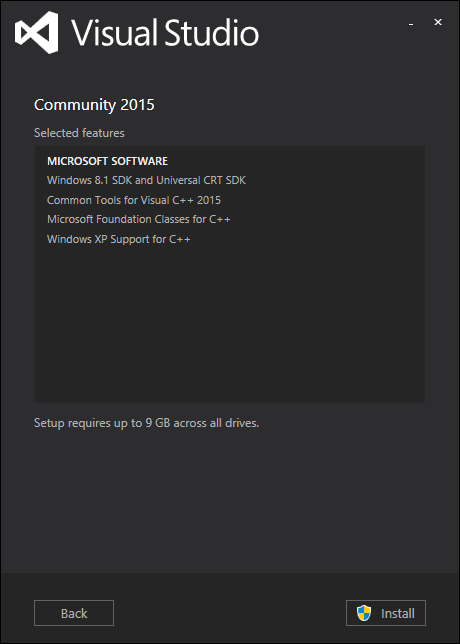
再次确认已经选择上了对应的功能
安装一个DDS程序
二进制软件包中已经默认绑定了 eProsima FastRTPS 和 Adlink OpenSplice 作为中间件。如果你想用其他的DDS软件。那么你需要使用源代码安装。
eProsima FastRTPS & Boost(只能在beta-1或之后的版本中使用)
FastRTPS 依赖于boost库。在这里下载安装包后安装。
这个安装包默认安装在C:\local。安装完成后添加下面的环境变量到系统中。
PATH=C:\local\boost_1_61_0\lib64-msvc-14.0
Adlink OpenSplice
如果你想使用默认的DDS程序即上面的FastRTPS那么你不需要进行下面的操作。
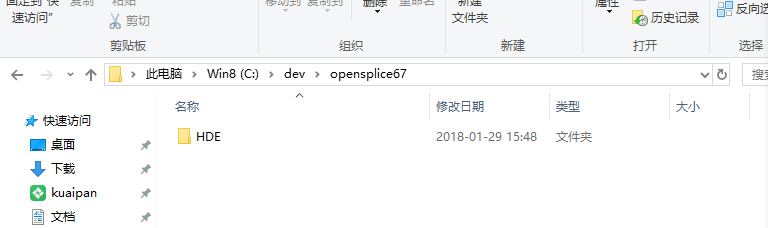
如果你想使用OpenSplice作为DDS软件。你需要下载最新的版本(ROS2要求的最低版本为6.7.170912).解压到C:\dev\opensplice67,注意文件夹的层级。你的文件夹结构应该如下图所示
安装OpenCV
之后的教程例子有些依赖于OpenCV. 你可以下载一个预先编译好的版本
https://github.com/ros2/ros2/releases/download/release-beta2/opencv-2.4.13.2-vc14.VS2015.zip
如果你使用的是预先编译好的ROS版本。那么你需要设置下面几个环境变量来告诉ROS2在哪里找OpenCV的库。假设你把OpenCV解压到C:\dev\文件夹下。你需要在PATH环境变量里面添加下面的变量c:\dev\opencv-2.4.13.2-vc14.VS2015\x64\vc14\bin
安装依赖
有些依赖文件并不在Chocolatey的软件库里面为了简化安装过程,我们提供了下面的Chocolatey软件包。
你可以在这里下载对应的软件包。
- asio.1.10.6.nupkg
- eigen-3.3.3.nupkg
- tinyxml-usestl.2.6.2.nupkg
- tinyxml2.4.1.0.nupkg
下载完成之后重新打开一个具有管理员权限的命令行程序,然后运行下面的语句
注意把choco install -y -s <PATH\TO\DOWNLOADS\> asio eigen tinyxml-usestl tinyxml2<PATH\TO\DOWNLOADS>替换成你实际的下载位置。 你还需要安装pip和yaml
安装时可能会出错,一般是编码的问题,你可以执行下面的语句设置命令行程序的编码python -m pip install -U pyyaml setuptools
设置完成之后再执行上面的指令安装。chcp 65001 //换成65001代码页 chcp 437 //换成美国英语
下载ROS2
- 进入ROS2的发布页面: https://github.com/ros2/ros2/releases
- 下载最新的Windows软件包
- 解压这个zip文件(推荐解压到C:\dev\ros2里面)
设置ROS2的环境
打开一个命令行程序然后source ROS2 的配置文件来自动配置好工作空间。 注意下面的指令只能通过cmd程序执行,powershell没法运行。
call C:\dev\ros2\local_setup.bat
执行过程中可能会提示找不到路径的错误。没关系可以继续进行下面的操作。 如果你下载了一个有OpenSplice支持的版本,而且你想用OpenSplice作为DDS程序,那么你可以执行下面的语句。反之则不用执行。
call "C:\opensplice67\HDE\x86_64.win64\release.bat"
这个语句要在上面一条语句执行完成之后才行执行。
尝试运行简单的例子程序
打开一个命令行程序,按照上面的说明设置好ROS2的环境。然后执行一个talker程序
ros2 run demo_nodes_cpp talker
再打开一个命令行,执行一个listener程序
ros2 run demo_nodes_py listener
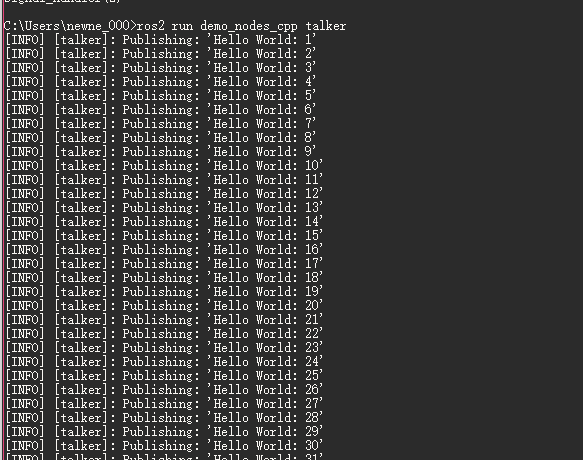
 你可以看到talker程序发布信息,listener程序说明自己接收到了对应的信息。
以前节点的通信通过master去实现,现在可以看到已经不需要master了。而且你可以尝试在不同的电脑上执行这个程序。不同电脑上的节点间不需要任何配置就可以通信了。
你可以看到talker程序发布信息,listener程序说明自己接收到了对应的信息。
以前节点的通信通过master去实现,现在可以看到已经不需要master了。而且你可以尝试在不同的电脑上执行这个程序。不同电脑上的节点间不需要任何配置就可以通信了。
常见问题
- 如果你由于缺少dll而无法启动例子程序,那么请确认上面的软件包依赖比如OpenCV已经添加到你的PATH环境变量中。
- 如果你忘记了执行local_setup.bat,那么例子程序可能会立即崩溃停止运行。