Configure drive parameters
There is an initialization time after the drive powers up with a status of 0. After initialization is complete, the status changes to 1 and the background color changes to green, in which case the Control Panel can be operated.
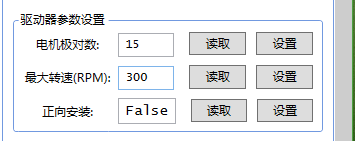
poles number
The number of motor poles means the number of magnetic pole pairs, and the usual hub brushless motor value is 15 or 12. Click "Read" to get the current setting value of the drive, click "Write" to send the current value to the drive ROM. If the actual number of the magnetic pole pairs of the motor is unknown, it can be calculated by counting the encoder count value recorded by the software when the motor rotates once.

Number of pole pairs = 1 turn count ÷ 6
Maximum speed control
Click "Read" to get the current setting value of the drive, click "Write" to send the current value to the drive ROM. The maximum speed of the motor is recommended to be set to the value actually needed, rather than the maximum value that the motor can achieve, which can improve the accuracy of low-speed control. For the maximum speed that the motor can achieve, please issue a speed control signal of 100 in the "speed open loop" mode, and the speed feedback value is the maximum speed, and the maximum achievable speed is related to the battery level.

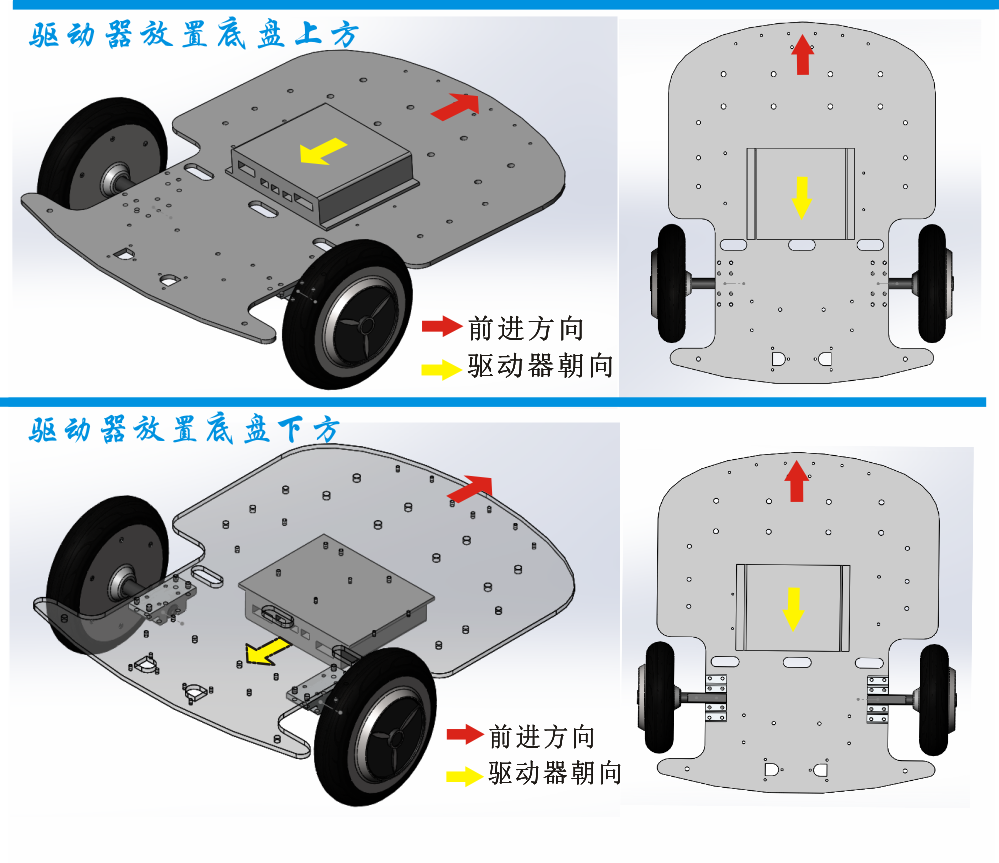
The installation direction corresponds to the left and right motor channels
Click "Read" to get the current setting value of the drive, click "Write" to send the current value to the drive ROM, the value can only be false, true these two cases. Forward mounting refers to the horizontal mounting of the drive face up, and reverse mounting refers to the horizontal mounting of the drive face down. In both mounting directions, in order to facilitate wiring, the corresponding wiring ports of the motor on the left and right of the drive are opposite. We assume that the drive is a rear-drive motor.
| Motor | Forward (True) | Reverse (False) |
|---|---|---|
| Left Motor | Ma1 H0 | Mb1 H1 |
| Right Motor | Mb1 H1 | Ma1 H0 |
Generic actions
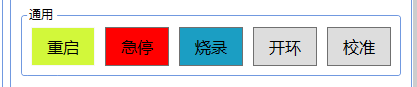
"Restart" makes the drive control chip restart, "e-stop" can brake two motors at the same time, "flash" configures the drive to be in the firmware update state, "open loop" temporarily configures the drive to speed open-loop control mode, and "calibration" starts the drive IMU automatic calibration program.