添加机器人
安装机器人端软件
下载机器人端服务程序
根据系统版本选择不同分支
| 系统版本 | 分支 |
|---|---|
| Ubuntu 16.04 | ubuntu1604 |
| Ubuntu 18.04 | ubuntu1804 |
| Ubuntu 20.04 | ubuntu2004 |
| arm64系统,如树莓派 | arm64 |
| windows | win10 |
下面指令中的[版本]替换成自己对应的版本,如windows就可以替换成win10
git clone http://git.bwbot.org/publish/galileo_proxy_robot --branch [版本] --depth=1
cd galileo_proxy_robot
设置配置文件
复制配置文件
cp .env-init .env
注意.env文件是隐藏文件,可能在文件浏览器中无法找到。可以在文件浏览器中使用Ctrl + H组合键显示隐藏文件。
安装自启动服务
对于Linux系统可以使用下面指令安装自启动服务。
sudo ./install.sh
这个指令会把GalileoProxy安装到系统自启动程序里面。下次机器人启动时此程序会自动启动。
如果一切正常那么现在GalileoProxy机器人端程序应该已经正常运行了。
可以通过
sudo service galileo-proxy-client status
查看程序运行状态,如果显示如下输出,则说明程序正常

注意对于非蓝鲸机器人系列,第一次启动的时候时会尝试1分钟获取机器人参数,期间会显示获取失败,但是并不影响。一分钟之后程序就会正常运行了
添加用户机器人
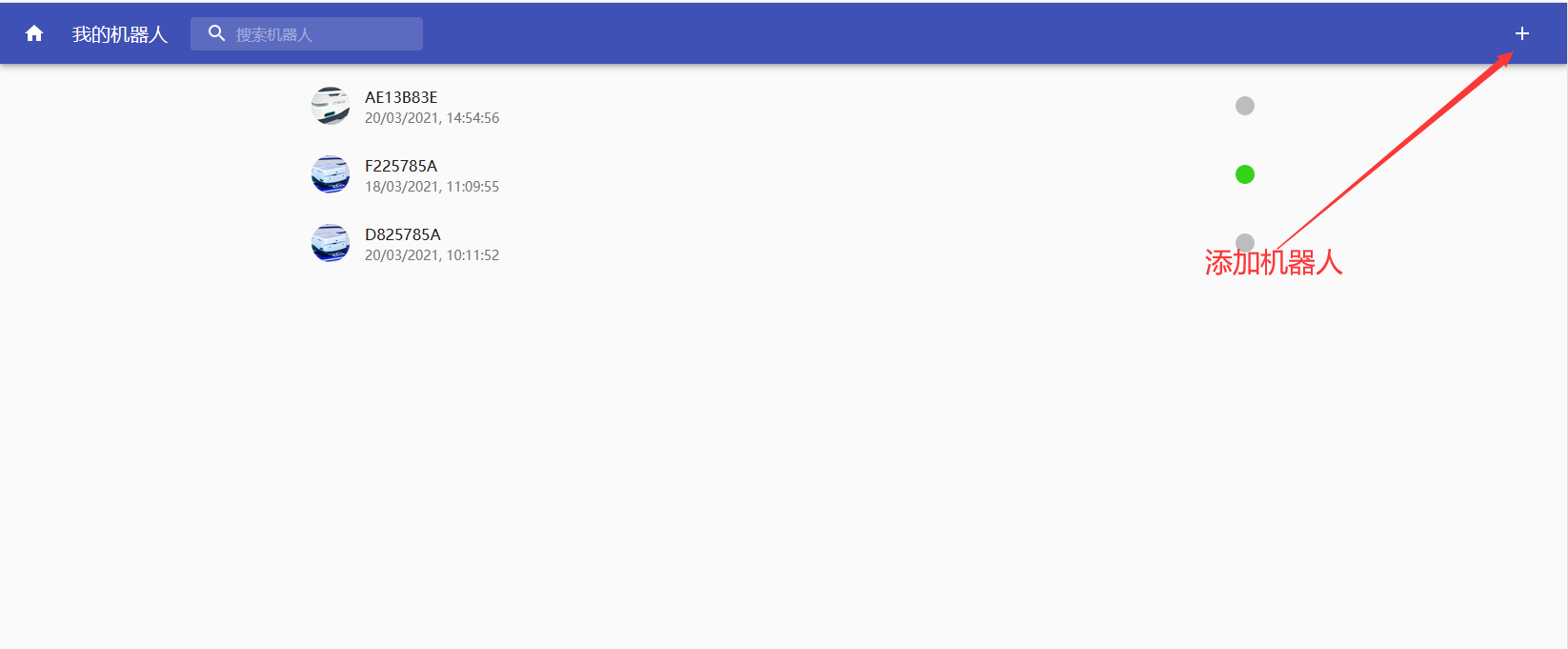
登录进入网页主界面,点击右上角的加号按钮
在新窗口内输入机器人的前8位ID
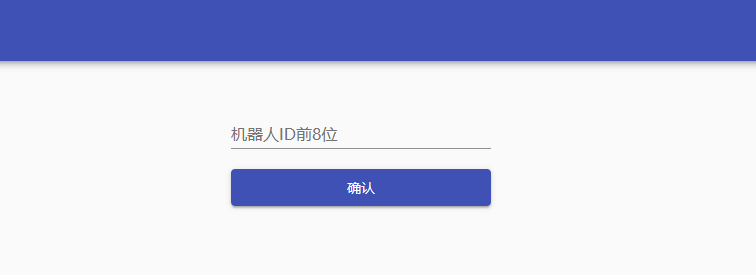
输入完成点击确认即可添加机器人。 此时回到主界面应该可以看到机器人已经出现在列表之中。
右侧的绿点代表机器人当前在线,灰色表示机器人未连接到服务器。
以上的操作需要保证用户已经被激活,且机器人尚未被其他用户添加。
机器人管理
在添加机器人后我们仍需要一些设置才能访问机器人。点击机器人列表,进入机器人设置界面
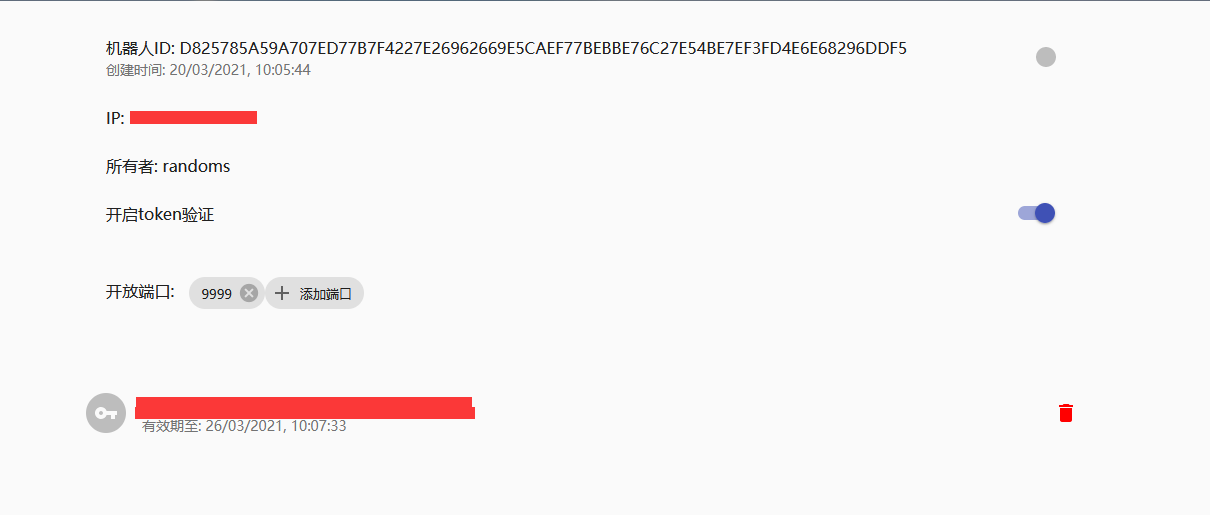
为了安全性,我们可以开启token验证功能,对于没有包含token参数的请求我们将拒绝访问。当然你也可以关闭token检查,由自己的程序进行安全验证。
为了防止用户随意访问机器人端口,我们还可以设置机器人开放的端口。未开放的端口将无法从GalileoProxy中访问
机器人端口设置
点击添加端口按钮,在弹出的窗口中输入需要开放的端口。比如图中即为9999端口。对于想要访问galileo api服务的用户可以开放3546,3547两个端口。 请根据自己的需要打开下面的端口
| 端口 | 功能 |
|---|---|
| 3546 | galileo api http 端口 |
| 3547 | galileo api websocket 端口 |
| 3548 | 数据统计服务端口 |
| 3551 | 机器人modbus tcp服务端口 |
| 8080 | 机器人图传端口 |
| 8081 | 机器人远程终端端口 |
| 8082 | 机器人远程桌面端口 |
| 8083 | 监控摄像头远程图传端口 |
机器人token设置
点击界面右上角的加号按钮即可添加token。在弹出的窗口中选择token有效的时间,设置完成点击保存即可。
此时界面中会显示机器人的token列表。