创建地图功能
创建地图
在想让机器人开始送餐之前,需要我们先带领机器人认识一下周围的环境。这个过程就是创建地图的过程。创建地图可以通过APP进行操作。
首先按照基础操作中的连接方法,将平板客户端连接机器人。
进入机器人任务控制界面,点击左侧菜单按钮。在弹出的菜单中选择创建地图

接着会弹出创建地图界面。界面如下图所示
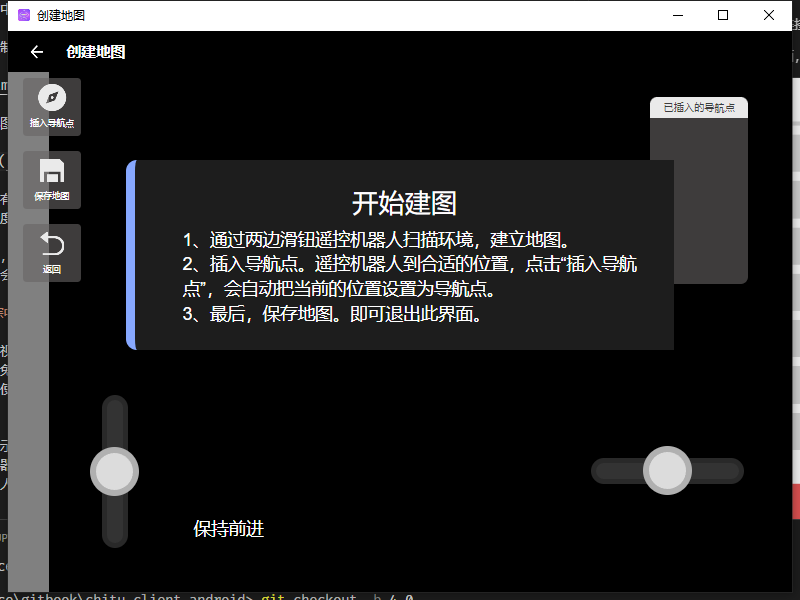
接着可以遥控机器人移动了。
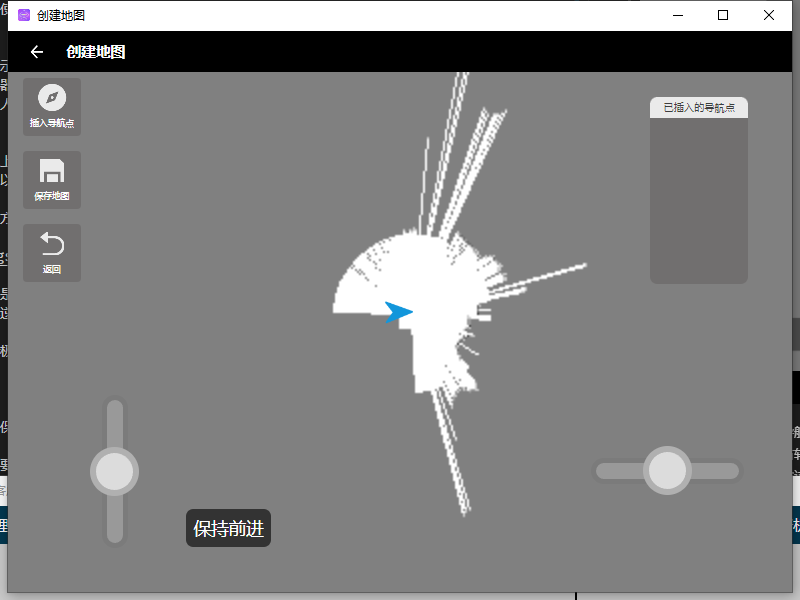
遥控过程中尽量避免纯转动(只按左转或右转,这容易使视觉系统丢失目标),请按住前进键的同时按左转或右转,使机器人沿大半径轨迹转弯。
遥控过程中视觉指示状态如果出现“闭环优化中”,请暂时不要操作机器人。当机器人走过的路径形成了一个圈时,机器人会自动的优化之前建立的地图,这样会极大的提高地图质量。因此在建图过程中可以遥控机器人多次走闭合的路径,这样会建立出更加精确的地图。建图的质量会极大的影响之后导航的效果。
插入导航点
在建图过程中,我们同时可以插入之后用于导航的目标点。目标点在送餐场景下就是餐厅的各个餐桌。在AGV模式下就是各个工位或货架。当机器人移动到对应位置后,点击左上角的插入导航点按钮即可插入。插入的导航点会在右侧的列表中显示出来。如果对已插入的导航点不满意,可以长按右侧列表中的导航点,然后点击删除按钮删除。
暂时退出建图
在建图过程中,如果需要暂时退出建图,可以使用系统的返回按钮,或者最上面标题栏的返回按钮。在弹出的是否取消建图的提示框中,选择取消。这样就可以暂时退出建图了。如果想要停止建图就选择确定。
保存地图
点击左侧的保存地图按钮。如果有插入的导航点,路径也会自动保存。默认的导航路径是机器人在建图过程中走过的路径。保存的路径名称为default。