常见问题与处理办法
4.1 图传画面卡顿、延时
请右键关闭图传后,重新打开图传,如果问题还是存在,请等待机器人驶离这段信号阻塞区域后再尝试
4.2 建图过程中视觉状态显示“丢失”,黑白图传画面中没有出现绿色的特征点
分如下两种情况: a. 打开视觉后,视觉状态没有出现过“追踪中” b. 视觉状态之前出现过“追踪中”,遥控建图过程中突然变成了“丢失”
解决办法: a.尽量保证机器人为直线运动,前进一段时间后再后退一段时间,如此反复动作直到视觉状态变成“追踪中” b.将机器人退回(保证机器人朝向不变)到视觉状态出现“追踪中”的最近位置,使机器人视觉系统重新锁定。 c.两个办法都尝试多次后,如果还是显示“丢失”,请关闭视觉然后重新开启视觉,从头开始扫描建图。
4.3 开启自主巡检后,视觉状态一直显示“丢失”,机器人在原地摆动
这种情况说明机器人无法识别当前位置,有两种可能: a.当前位置在建图扫描过程中没有被记录过,b.当前位置的光照强度或者物品分布发生了较大的变化。 对于第一种情况请将机器人遥控到建图扫描过的位置,保证机器人朝向和建图时的朝向一致,再重新开启自主巡检。 第二种情况,需要对环境进行重新扫描建图,巡检路径和站点也需要重新绘制。
4.4 无法关闭导航服务
多尝试点击几次,如果还是无法关闭,请手动关闭机器人底盘电源开关后,再通过客户端软件使车载主机关机。
4.5 规划巡检路径和轨迹时,加载的地图显示出一团乱糟糟的青色点、蓝色机器人轨迹点明显不像建图时的遥控路径
这说明视觉地图的建立失败了,请重新进行一次扫描建图,然后再尝试。
4.6 客户端无法连接机器人
请登录局域网路由管理界面,检查客户端PC和机器人主机是否都已经连上网络,参考第二章的联网操作重新设置一下两者网络。
4.7 自定义软件图标和名称
在客户端安装文件夹内有一个config.json的配置文件。其文件内容类似下面
{"defaultLang":"zh-cn","name":"","icon":""}
这是客户端配置文件,其中defaultLang为客户端默认语言,name为客户端默认名称,icon为客户端默认图标。把图标文件放置于安装路径下,然后设置icon的值为图标名称。图标格式为一般的图片,保证长宽比为1:1。比如想要设置名称为 logo.png 的图片,做如下更改
{"defaultLang":"zh-cn","name":"","icon":"logo.png"}
4.8 地图的分发
一台机器人建立的地图可以分发到其他机器人,供其他机器人使用。
对于5.0以下版本的机器人,可以通过winscp连接机器人下载对应地图
机器人默认用户名和密码为xiaoqiang
地图路径位于 /home/xiaoqiang/saved-slamdb 此文件夹里面为所有的机器人地图,选择对应的目标下载到本地。然后同样通过winscp连接其他机器人,把地图文件上传到对应的机器人路径下面即可。
演示视频
对于5.0-6.1.4版本需要先执行地图导出指令
假如需要导出的地图名字为map1,则首先连接机器人。对于win10系统可以直接打开系统自带的powershell程序,然后输入下面指令连接机器人
ssh xiaoqiang@xxx.xxx.xxx.xxx
其中xxx.xxx.xxx.xxx是机器人ip地址
导出地图
cd ~/saved-slamdb/map1
~/Documents/ros/src/galileo_api/tools/slamdb_converter -e -f -n map1
注意把指令中的map1换成自己的地图名称。
地图导出完成后和上面的方法一样,把地图上传到对应机器人里面
地图复制完成后还需要执行导入地图指令
ssh xiaoqiang@xxx.xxx.xxx
cd ~/saved-slamdb/map1
~/Documents/ros/src/galileo_api/tools/slamdb_converter -i -n map1
如果之前有重名的地图要先把老地图删掉
cd ~/saved-slamdb/map1
~/Documents/ros/src/galileo_api/tools/slamdb_converter -d -n map1
演示视频
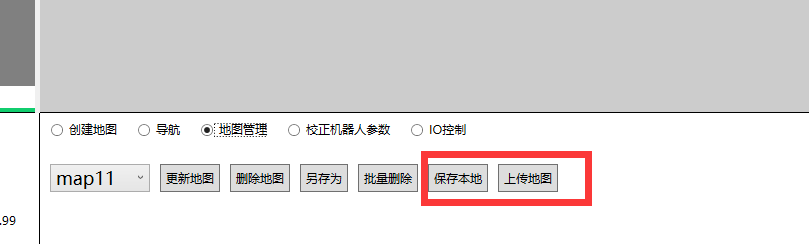
对于版本大于6.1.5的机器人,客户端上提供了地图下载和上传功能。